
激光雷达VS人工智能,关于自动驾驶我们该相信谁?


2021年可谓是激光雷达量产元年,在这一年中蔚来、小鹏、埃安、长城等多家品牌都公布或上市了配备有激光雷达的产品。
而在2022年,激光雷达在新能源领域中更是成为了一个讨论度极高的话题。
种种迹象表明:如今在自动驾驶的江湖中,似乎有一支激光派正在异军突起。
但关于自动驾驶的未来,有人存在其他的想法。2019年4月,特斯拉的掌门人马斯克曾说:
“激光雷达像人身上长了一堆阑尾,而阑尾本身的存在就是毫无意义的。”
而在2022年4月,丰田汽车旗下的子公司Woven Planet(编织星球)对外表示:
“在未来的辅助驾驶以及更高阶的自动驾驶项目中,我们将采用单一视觉方案进行开发。”
在自动驾驶的技术路径上,代表未来的特斯拉与象征保守的丰田却意外地走到了一起,在视觉派的道路上越走越远。
激光派和视觉派有何本质的区别?自动驾驶的未来又将去向何方?诸君且听我慢慢道来。
基本逻辑的本质区别
想要搞清楚激光派与视觉派的本质区别,我们还是要先回到自动驾驶的基本逻辑上来。
作为一个驾驶员,我们的驾驶行为通常可以被拆分为以下几个步骤:眼睛观察、大脑反应、最后落实到四肢行动上。

自动驾驶的流程和我们人类开车类似,也可以被分为三大模块:
感知、决策、执行。
而激光派与视觉派的争论焦点——就是在自动驾驶的系统构建中,感知与决策谁才是真正的核心?
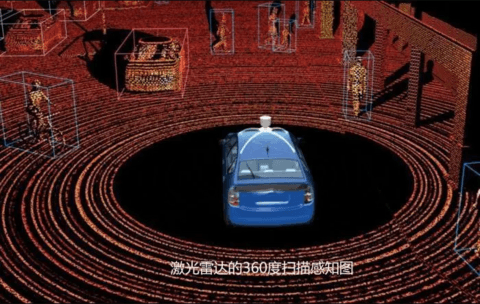
激光派认为自动驾驶的核心模块应该是感知,他们的逻辑是:
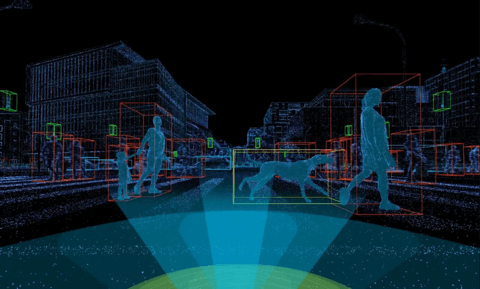
依靠以激光雷达为核心的传感器矩阵收集三维物理数据,在物理数据的基础上构建场景模型及进行AI演算,现实的物理数据才是系统的核心,这是一套自下而上的逻辑。
与激光派不同,视觉派认为自动驾驶系统的核心模块应该是决策。他们的逻辑是:
和人类开车相似,依靠摄像头为主的传感器组收集信息,再由AI将二维图像转化为虚拟的三维模型,AI决策与演算是系统的核心,是一套自上而下逻辑。
搞清楚激光派与视觉派的本质区别后,二者在实际应用场景下的优劣势也就十分清晰了。
视觉派与激光派的技术优劣
视觉路径在自动驾驶领域中运用得较早,相关的技术特征目前在行业中也已经形成了共识。
由于视觉路径的核心是AI构建,不论是将二维图像转换为三维模型,还是依据虚拟的三维模型产生行为决策,都要有一个足够聪明的AI。
以目前的技术手段,只有进行大量的场景训练才能提高AI的智能化程度,但这也是视觉路径的死穴:
AI毕竟不是人类,只能依据已有的道路经验进行决策,一旦出现未曾学习的场景,很有可能无法判断现场情况并导致出现安全隐患。
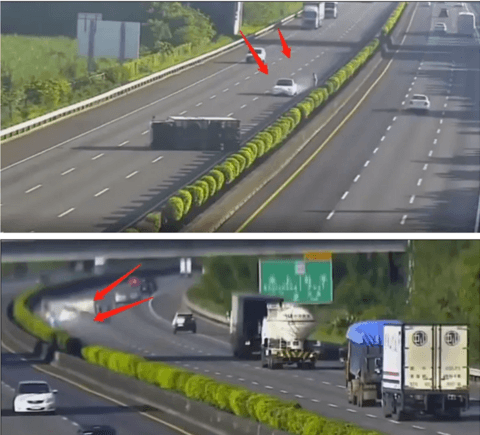 特斯拉名场面
特斯拉名场面视觉路径相比起激光路径最大的优势,无疑就是成本了。
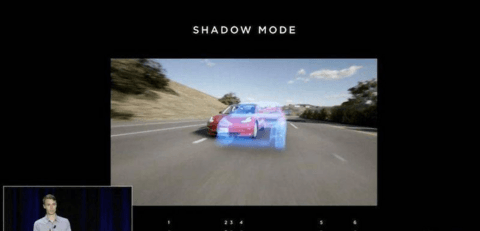
首先在传感器层面,以摄像头为主的传感器组成本会更低。而在AI的训练问题上,依靠大量用户的后期训练,也可以实现成本的有效转移,例如特斯拉车型上运用的 “影子”模式,可以自主学习车主驾驶习惯。
而激光路径作为较晚出现的产物,与视觉路径相比具备更强的安全性。
我们可以将激光雷达视为自动驾驶系统中的虚拟保险杠,基于现实物理数据构建的三维模型可靠性更强;如果遇见了AI未曾学习过的非常规情况,系统的安全标定也可以偏向物理数据,所以激光路径在理论上能提供更好的安全性能。
但激光路径目前最大问题,则就是昂贵的价格了。
早期的激光雷达产品,例如Velodyne公司在2017年发布的相关产品,单价高达7.5万美元;2008年至2020年,相关产品的售价也还停留在1000美元左右;2021年,虽然华为已官宣将相关产品的售价控制在500-200美元,但目前尚未实现大批量产。
自动驾驶路在何方
关于自动驾驶的路径选择,其实本就不是一个鱼与熊掌不可兼得的命题。
基于华为等供应商目前关于产品价格的下降趋势,我们有理由相信在激光雷达的成本在未来将逐渐被主机厂所接受,小鹏P5等产品的上市也从侧面验证了这一点。

而特斯拉等视觉派本就在AI算法方面就具备优势,如果成本足够合理,为加强系统安全性而出现“临阵倒戈”的情况也不是不可能。
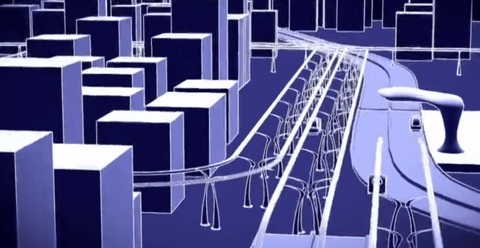
除了主机厂的主观意愿外,宏观环境也在发生着变化:基于高精地图、智能道路、V2X万物互联系统等子系统构建的大交通体系是未来基建的必经之路,这一趋势下对于底层道路数据的需求量将会激增。
对于主机厂而言,激光雷达等传感器所获取的道路信息,不仅仅能在未来产生更大的商业价值,更有可能在国家相关部门的管理中被整合进大数据体系中来。
所谓天下分久必合,合久必分,未来的自动驾驶江湖中可能再无激光派与视觉派的纷争了。
结语
在当下的中国,我们不仅拥有世界上最大的新能源市场,而且还拥有诸多技术最领先、性价比最高的零部件供应商。
而我们的自主品牌,近年来他们所坚持的AI全栈自研与产品智能化提升,使得当下的市场中对于自动驾驶技术的接受度越来越高。
在市场与技术的双重催化下,自动驾驶技术在中国可能将拥有一个更广阔的未来。




















