
用 Model Y 跑 Robotaxi,特斯拉按下商业化启动键



特斯拉的 Robotaxi,终于驶入公众视野。
6 月 22 日,首批以 Robotaxi 形式运营的 Model Y 车型在奥斯汀正式上线,面向公众提供打车服务,并按照每单 4.2 美元(约合人民币 30 元)的固定价格收费。

不过,这场试运营仍处于高度受控的「小规模验证」阶段,具备一些限制条件:
数量限制:首批投放不到 20 辆;
区域限制:仅在奥斯汀南部特定地理围栏内运行,覆盖区域约 30 平方英里;
时段限制:运营时段为每天 06:00 至 00:00,恶劣天气时暂停服务;
人群限制:仅开放给约20 名受邀用户,后续视安全表现逐步放开;
监管限制:车内副驾位坐着安全员,远程操控团队持续监控。
在这盘 Robotaxi 棋局中,马斯克采取了「大胆设想、小心落子」的行事风格。
马斯克曾在社媒上表明,由于监管问题,试运营日期随时有跳票可能。事实如此,就在试点前一周,六位德州民主党议员曾联合致信,要求将上线时间延后至 9 月。但特斯拉还是选择顶住监管压力,按计划进行。
据悉,试运营首日,特斯拉 Robotaxi 已完成约 112 次行程,累计行驶约 499 英里。马斯克对此表现非常满意,专门在社媒上对 AI 团队予以称赞。
尽管第一步落子极为谨慎,马斯克对后续扩张却展现出极强信心,计划在数月内将车队规模提升至 1000 辆,年内业务拓展至旧金山、洛杉矶、圣安东尼奥及加州其他区域。
无论如何,全球 Robotaxi 领域最具颠覆性的玩家终于下场,所有人都在期待,特斯拉完全打破常规的思路,到底能不能解好 Robotaxi 这道题?
01、当 Model Y 成为 Robotaxi
这次投入试运营阶段的为 2025 款 Model Y,外观与普通版车型无异,仅增加了 Robotaxi 的特殊标识。
马斯克曾表示,测试车辆均未经过特殊改款,相当于从产线下来就直接开上路。
这相当于特斯拉的 FSD 摊牌了,在业内习惯性将 L4 与 L2+两条技术路线区隔开时,FSD 已经上演了一场从 L2+到 L4 的技术跃迁。
这里的潜台词是,搭载新版 FSD 的 Model Y,或已具备全无人驾驶的「出厂设定」。
更令人兴奋的故事或将发生在 28 日,届时首辆实现「全无人驾驶」的 Model Y 将直接从工厂激活 FSD 后,自动开往车主家门口。相当于,特斯拉新车交付环节都已不需要用户到场。

某种程度上,窥探 FSD 真实实力的窗口又扩大了些。我们尝试从冰山之下的底层基建上看待特斯拉做 Robotaxi 这件事。
据悉,试运营 Model Y 车型已搭载下一代 FSD,模型参数量是现有模型的 4.5 倍,目前算法仍在优化阶段,预计今年晚些时候可以正式推送。
实际上,目前搭载在 Model Y 车型上的 FSD 版本已经初显威力,该版本仍基于 HW4.0 打造,但在业内火拼的「车位到车位」赛道,FSD 不仅率先通关,还能做到无需预学路线、不受停车场景限制,真正实现「上车即走、点对点直达」。
支撑特斯拉技术凶猛迭代的,是其重金押注的 AI 基座:
今天,国内外智驾玩家同样掀起 AI 军备竞赛,像小鹏斥资打造的世界模型基座,依托 10 EFLOPS 算力训练,参数量高达 720 亿,视频数据量年底将扩张至 2 亿 Clips。
但特斯拉豪掷百亿美金打造的 Dojo 超算中心,按照 2024 年底目标,云端算力已经达到了 100EFLOPS。
更凶悍的武器已在路上:
比如 HW5.0 芯片,采用 3nm 制程工艺,AI 算力约为 2000–2500 TOPS,较现款 HW4(500 TOPS)跃升 4-5 倍,预计明年全面铺开。以及定位为比 Dojo 1.0 更高效、更低成本的 Dojo 2.0 也取得显著进展,预计在 2026 年推出。
一个硬核事实是,特斯拉 Model Y 版 Robotaxi 的确能在算法加持下,用 8 颗摄像头组成的传感器与 Waymo 等「Robotaxi 老将」在硬碰硬,但目前可能仅局限于纯技术层面。
Robotaxi 的战场远不止于代码与传感器。当特斯拉试图将这项技术推向商业运营的深水区,尤其采用传闻中「自有车队+车主共享」混合模式时,真正的挑战才浮出水面。
Uber CEO 科斯罗萨西的曾提出质疑,造自动驾驶汽车与运营高效、弹性的出行网络,是两种截然不同的能力基因。潜在问题包括:
调度困境: 如何避免车主车队分布不均导致用车冲突?Uber 能动态调节司机供给,特斯拉的「兼职车队」能否响应实时需求波动?
服务断层: 当车辆故障、事故纠纷或特殊乘客需求出现,特斯拉是否有成熟的线下支持网络与服务流程?
特斯拉擅长的前者是「造车逻辑」,而 Robotaxi 其实是「服务逻辑」。
今天走在商业化前列的 Waymo、文远知行、小马智行给出的方法论是建立「技术-运营-造车」的铁三角关系,通过成熟出行平台的经验,来处理供需匹配、车辆调度、乘客服务等异常问题。
但特斯拉选择一人包揽三角,其实是把 Waymo、Uber 的蛋糕都抢了。但这样的代价是特斯拉必须从零搭建一套从未验证过的运营体系。
从现有信息看,特斯拉其实也在认真干这件事:
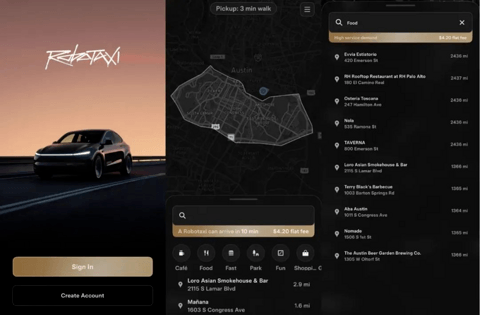
一是开发 Tesla Network 平台,核心支持车主灵活加入/退出车队、设定服务区域,并实现车辆调度与乘客交互功能;
二是打造智能自清洁系统。从公布视频看,该系统具备自动消杀、深度清洁、自动送洗功能。
但由于这些功能都未落地,尚不能评判特斯拉 Robotaxi 的真实运营能力。但可以确定,当特斯拉 Robotaxi 驶出测试场,直面真实用户、复杂路况与严苛的商业效率考核时,它需要补的课还有很多。
02、特斯拉 Robotaxi,从 0 到 1 还有点难
特斯拉 Robotaxi 要跨过的第一道门槛,不是运营难题,而是政策破冰。
先回忆下特斯拉最初发布的 Robotaxi 形态,是一款无方向盘、无脚踏板、无制动系统的极具未来主义审美的特殊车型——Cybercab。但这款车在去年 10 月发布会上亮相后,就鲜少在公开道路露面。
据悉,德州工厂在今年 3 月开始了 Cybercab 的铸件生产,车辆制造线正在逐步搭建中,计划是明年进入量产阶段。
由此,在车未备好的情况下,特斯拉选择启动 Model Y 版 Robotaxi,实际是想通过熟悉选项通过安全监管,并加速 FSD 的实战验证,这样后续推出 Cybercab 这一新物种时能更快获得公众信任。
事实证明,特斯拉在这件事上的顾虑是对的。
Model Y 版 Robotaxi 尽管与普通版本基本无异,但在监管上遭遇的阻力依然不小。
就像这次首运营点选在特斯拉大本营——德州奥斯汀,其实已经是特斯拉 Robotaxi 测试的「理想沙盒」。
实际上,德州已经是全美少数对无人驾驶测试较宽容的州之一,允许完全无人驾驶汽车上路(无方向盘、无司机),在加州还需要车辆局逐条批准测试路线,审批流程严格。
但即便如此,地方层级的政治压力依然来到了特斯拉面前,此前 6 位德州民主议员联名致信特斯拉,要求推迟 Robotaxi 测试与部署时间到 9 月,理由包括安全顾虑、影响现有工作岗位、缺乏公众知情权和社区参与等,议员们认定当前 Robotaxi 测试还缺乏透明度。
而之所以推迟到 9 月,是由于 9 月将生效新方案,要求自动驾驶企业申请运营许可并提交《急救人员互动计划》,这或将削弱现有宽松环境,届时特斯拉或将受到更多监管约束。
回顾马斯克对于 Robotaxi 的畅想,Robotaxi 是一种新型城市交通模式的探索,它出行费用低廉,可以做到每英里 0.2 美元,不会产生人为驾驶事故,甚至能重构城市空间使用。
目前来看,现实离马斯克画的「饼」还有很远,单定价上,特斯拉的 Robotaxi 就还存在较大差距,目前试运营收费大约在每英里 1 美元。
只能说,按照特斯拉不加装激光雷达等冗余传感器、Cybercab 无制动措施等技术构想,要度过 Robotaxi 从 0-1 的启动期,注定是一个充满挑战的过程。
毕竟,Robotaxi 本身就象征着无人驾驶最难形态,它在道路复杂度、用户体验以及高并发调度上要求极高。
今天跑出来的玩家,如 Waymo、萝卜快跑等,通常采用高成本多传感器方案(如激光雷达+毫米波雷达+摄像头)来确保安全冗余,并构建了较成熟的车队运营体系,但扩张速度上依然要受到各地监管的严格限制。
相较之下,从商业化实践来看,作为无人驾驶的另一种范式——RoboBus(无人驾驶小巴),其商业化落地路径则更为顺畅。
由于 RoboBus 通常运行在封闭园区,或开放但低复杂度的城市慢速路段或专用道中,能够以较低速度和更强路线可控性降低技术挑战门槛。
代表玩家有 PIX Moving,它从 RoboBus 这一垂直形态突破,以更高的可控性换取更快的商业验证节奏。

一方面,PIX Moving 没有贸然挑战城市公开道路的大型自动驾驶法规,而是选择低速、短途、封闭/半封闭场景先入为主。
在很多国家地区,低速自动驾驶车辆(≤30km/h)被划分到「非机动车或特殊用途车」范畴,法规包容度更高。
另一方面,其主要面向 B 端市场,比如在科技园区、景区、校园、机场等场景下提供接驳、通勤服务,绕开了 Robotaxi 面临的严格牌照限制。
当然,快速落地的核心原因,在于 PIX Moving 的 RoboBus 易于融入现有交通生态与生活场景,精准解决了高频、刚性的短途出行痛点。
实践证明,这的确是一种更灵活、务实的方式。
03、从想象到落地,一种轻型商业化范本
如今仍留在牌桌上的 Robotaxi 玩家,主基调已经明确:全球化布局。
Waymo 在扩展奥斯汀、亚特兰大等城市后,计划在日本启动测试;
文远知行、小马智行继进入中东市场后,也开始进军欧洲;
萝卜快跑预计年底落地新加坡、马来西亚,已在香港完成超 1.4 万公里测试……
但全球化的本质,并不仅仅是地图上「打点」,而是对技术成熟度、运营体系和成本结构的全方位考验。
一个 L4 产品能否真正复制出低成本、高频次的通勤体验?早期的安全员配备如何优化?路权与政策如何高效落地?每进入一座新城市,这些问题都必须被重新回答一遍。
而在这些挑战面前,相比于需要在开放道路中灵活应对复杂交通流的 Robotaxi,RoboBus 由于风控范围更小,也天然具备更清晰的监管和成本模型,更容易「模块化」地在不同城市快速复制,正逐渐显现出作为「场景楔子」的优势。
一个直接例证是,PIX Moving 以 RoboBus 为主的产品,目前已经驶入全球 30+个国家和地区,包括欧洲、东南亚、中东、美洲。
当然,特斯拉也有类似构想。
在今年 Cybercab 发布会上,除了强调两座无踏板、无方向盘的 Robotaxi 之外,马斯克还展示了一款更具未来感的 Cybervan(RoboBus):可容纳 20 人,依托 FSD 系统实现完全自动驾驶。
据测算,Cybervan 的运营成本未来或将低至每英里 0.05–0.10 美元,远低于 Cybercab。

但不同于 PIX Moving 已跑通的商业路径,Cybervan 的量产规划仍排在 Cybercab 之后,时间上预计要到 2027 年。
从落地进度与产品逻辑来看,PIX Moving 眼下已经快了一大截。
这主要得益于它的两个核心能力:低成本与高柔性。
一是打破「高筑墙」的重资产造车范式。
PIX Moving 采用 3D 打印 + AI 生成设计,摒弃传统模具与装配流程,能将零部件数量减少 70%、模具成本降低 90%,制造周期缩短至数月内,大幅提升定制效率与交付速度。
二是采用模块化架构,做到多场景快速适配。
其「滑板底盘 + 功能舱体」设计,使车辆可灵活配置于接驳、巡逻、休闲、零售等场景。例如在接驳类 RoboBus 中,PIX 配备动态悬挂系统,提升乘坐舒适度。
这种架构也天然适配不同市场的文化与使用环境,比如中东地区舱体配备空调系统和沙漠地形悬挂,适应极端气候,日本地区舱体采用右舵布局并集成电子后视镜等。

而在商业落地策略上,PIX Moving 普遍采用低门槛试点策略:试点阶段免费或低价开放,验证效果后再模板化快速复制,从点状渗透到区域性拓展。
由此,PIX Moving 已打通从研发、设计、制造到部署、运维的完整商业链路,在全球化方向上形成了差异化且可持续的商业模型。
实际上,无论是 Robotaxi 还是 RoboBus 的竞技,实则是技术路径与商业逻辑的双重博弈。
PIX Moving 已经提供一条思路,即可持续的自动驾驶商业化,不依赖技术堆砌,而在于能否以低成本、高柔性的方式,解决真实场景中的微小需求。
正如其理念中写到:「不是取代人类,而是和城市共生;不是炫技,而是让 AI 真正融入生活。」
当 RoboBus 悄然穿行于校园、景区、机场时,这种对人们出行方式「轻盈的改变」,或许才是技术落地的终极答案。
-
从吐鲁番回来的问界M8,用极限测试证明了自己的品质含金量
![从吐鲁番回来的问界M8,用极限测试证明了自己的品质含金量]()
-
乐道L90提车分享:这台车把我的ModelY所有缺点都解决了,秒下定!
![乐道L90提车分享:这台车把我的ModelY所有缺点都解决了,秒下定!]()
-
20年驾龄老司机:聊聊领克09EM-P的能耗和省钱小妙招!
![20年驾龄老司机:聊聊领克09EM-P的能耗和省钱小妙招!]()
-
理想L6车主:增程是油老虎?我平均油耗6.5,出乎意料!
![理想L6车主:增程是油老虎?我平均油耗6.5,出乎意料!]()
-
终于轮到李斌当爽文男主了
![终于轮到李斌当爽文男主了]()
-
长安启源全新Q05,小型纯电SUV带小蓝灯,十万级的激光雷达
![长安启源全新Q05,小型纯电SUV带小蓝灯,十万级的激光雷达]()
-
岚图FREE+提车分享:性价比高,非常推荐!
![岚图FREE+提车分享:性价比高,非常推荐!]()
-
宋PLUS车主:比亚迪三电非常牛,不是冰箱彩电大沙发能抗衡的
![宋PLUS车主:比亚迪三电非常牛,不是冰箱彩电大沙发能抗衡的]()
-
【NE数据】2025年上半年乘用车电驱动、OBC装机量:供应链收敛,电驱相关前十市占率超7成,OBC超9成
![【NE数据】2025年上半年乘用车电驱动、OBC装机量:供应链收敛,电驱相关前十市占率超7成,OBC超9成]()
-
【NE数据】2025年上半年乘用车电池/BMS装机量:233.6GWh,再创新高!吉利系成最大黑马
![【NE数据】2025年上半年乘用车电池/BMS装机量:233.6GWh,再创新高!吉利系成最大黑马]()




















