
法国研究人员研发高速扫描激光雷达 或可用于自动驾驶汽车
盖世汽车讯 脉冲激光扫描是自动驾驶和机器人移动出行的核心技术,此种技术的原理即定向光脉冲被反射物体向后散射,并利用脉冲发射和探测到脉冲之间间隔的时间来计算深度。此类返回激光脉冲的直接飞行时间(d-ToF)测量结果使得复杂场景的三维成像成为可能。
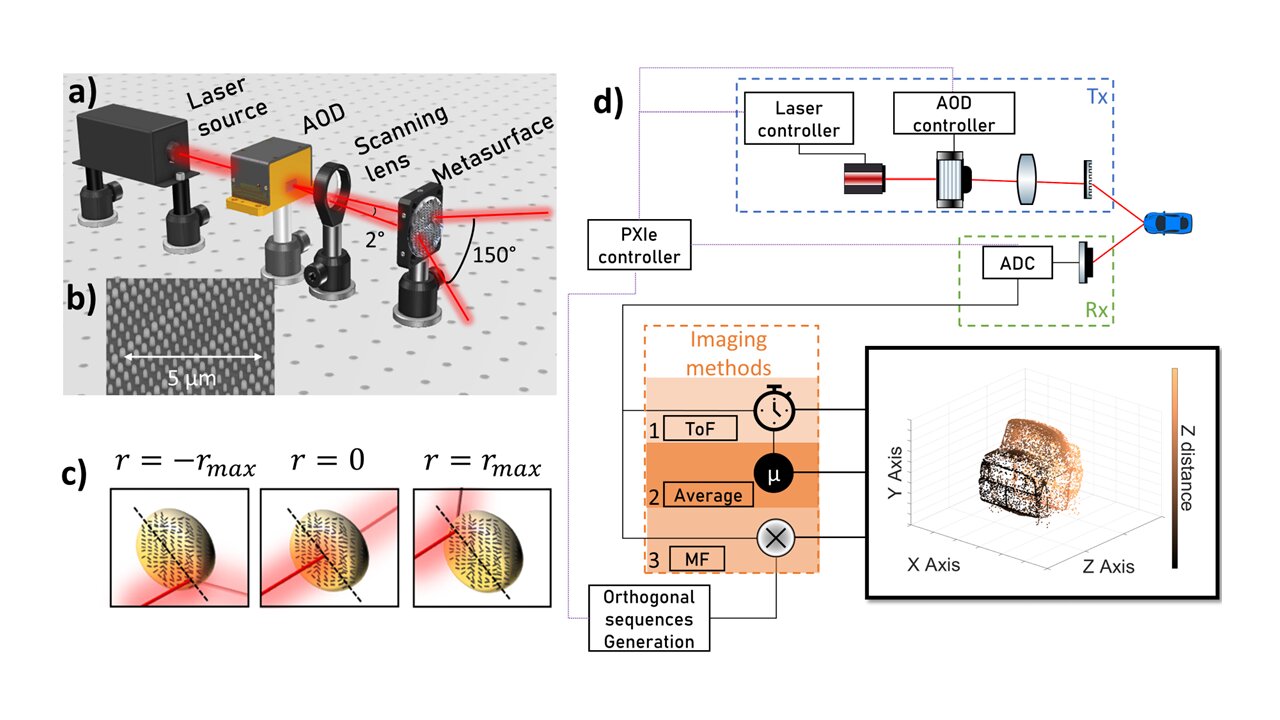
超快高视场超表面激光雷达的架构(图片来源:蔚蓝海岸大学)
目前,激光雷达技术还需要得到大量的发展,包括提升高角度分辨率的观测视场(FoV),改进成像帧率,通过降低信噪比(SNR)扩大模糊范围,降低制造成本和组件尺寸,从而让其在全球市场上实现大规模工业化应用。
法国蔚蓝海岸大学(Université Côte d'Azur)Patrice Genevet研究小组提出了一个创新解决方案,以解决激光雷达技术的一些限制,并满足汽车激光雷达的苛刻要求。
来源:盖世汽车
作者:Fairy
本文地址:
以上内容转载自盖世汽车,目的在于传播更多信息,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。
相关内容

全部评论·6
暂无评论










