
刘经南院士:高精度道路导航地图的进展与思考
一、前言
传统导航地图在日常生活中主要被用于导航和查询地理信息,出行的人群是其主要服务对象。基于人类自身的视觉识别能力和逻辑思维能力,很多道路信息都被精简。随着互联网时代的高速发展,更多基于位置的新型服务和行业被提出,例如「互联网+」智能交通、无人系统等。
国家发展和改革委员会提出的促进智能交通发展的「互联网+」便捷交通实施方案已经正式发布。这些服务都是依托互联网来开展的,因此地图的服务对象不再仅仅是人类,而是慢慢向机器过渡,这对地图的精度、内容结构和计算模式等都提出了新的要求。
(一)地图精度
普通导航地图的精度在5m左右,只描绘了道路的位置和形态,没有反映道路的细节信息,无法准确知道车辆所在位置。
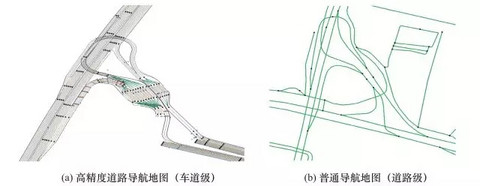
图1高精度道路导航地图和普通导航地图对比示意图
而高精度道路导航地图的绝对精度要求优于1m,相对精度达到10-20cm,包含了车道、车道边界、车道中心线、车道限制信息等非常丰富的信息,如图1所示。
(二)地图内容结构
高精度道路导航地图更加真实地反映道路的实际样式,因此包含更多的图层数量和道路数据,图层描绘也更加细致。高精度道路导航地图不仅具有更高精度的坐标,还拥有更加准确的道路形状。同时,每个车道的坡度、曲率、航向、高程等数据也被添加进来。
另外,车道之间的车道线情况(虚线、实线、单线和双线)、车道线颜色(白色、黄色)、道路隔离带、隔离带材质、道路箭头、文字内容和所在位置在高精度道路导航地图中都需要详尽描述。
(三)计算模式
高精度道路导航地图的数据量是普通地图的10^5倍甚至更多,目前以云计算为核心的集中式大数据处理模式已经满足不了需求。
随着物联网和5G通信技术的快速发展,云端协同的计算方法——边缘计算被提出,同时众包的任务发布模式也被应用于多个行业。因此高精度道路导航地图的大数据处理模式可以采用「众包+边缘计算」的模式。
二、相关现状
随着智能交通和自动驾驶领域的飞速发展,现有的普通导航地图在内容、精度和完整性方面都无法满足高层次的应用需求[2]。针对道路的高精度电子地图被逐步提出并得到了广泛的认同[3,4]。
目前在辅助驾驶系统和自动驾驶领域使用高精度道路导航地图数据的研究较多。例如根据高精度道路导航地图进行信息行为和车辆定位的研究[5,6],在辅助驾驶和自动驾驶系统中使用高精度道路导航地图信息并在其上进行自动驾驶车道轨迹引导方法的研究[7,8]。
而关于建立高精度道路导航地图的方法研究也有很多,例如通过配备GPS-RTK的采集车沿特定线路采集数据[9];使用激光雷达与广角摄像头结合的方法提取道路信息,加上配备高精度全球卫星导航系统(GNSS)则能够达到10cm精度,但这种采集方案成本较高[10];也有研究者提出使用低成本传感器创建车道级地图的方法,通过全球定位系统+惯性导航系统(GPS/INS)紧耦合进行定位,从正射影像图中获取相关地图信息[11]。
目前国内外从事高精度电子地图的测绘和生产的单位也逐渐增多。在Google以及Daimler的无人驾驶汽车的研制过程中,高精度电子地图都是重要的组成部分[12]。2015年,奥迪、宝马、Daimler 联合起来斥资31亿美元购买诺基亚Here地图,为研发高精度道路导航地图做准备。
2015年,高精度道路导航地图已经应用于特定场景,2011年宝马的3系Track Trainer,2014年奥迪的RS7都利用高精度道路导航地图技术在Laguna Seca和Hockenheim成功跑完了赛道。
从2016年开始,很多互联网企业通过收购的方式获取地图数据资源,然后结合自身算法、云计算能力生产高精度道路导航地图,如Google、Uber、百度、阿里等。同时,车企也开始依赖第三方地图服务,2017年初,Mobileye与大众、宝马和日产签署协议,前者将为三家汽车巨头提供地图产品,而汽车厂商将负责为Mobileye提供更多的地图数据。
三、需求分析与建模
本文从「互联网+」智能交通应用及未来20年无人系统行业发展的典型应用场景出发,将高精度道路导航地图划分为6层建立需求模型,如图2所示。
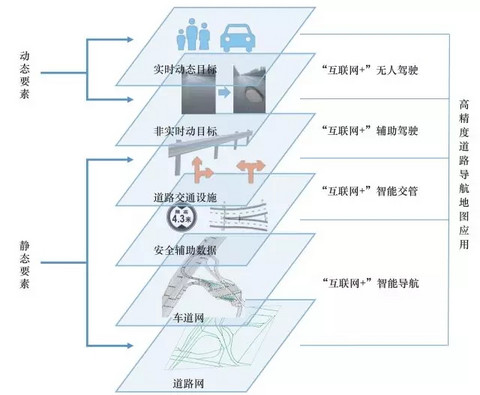
图2高精度道路导航地图应用分析
(一)「互联网+」智能导航
随着城市环境的不断建设,为了提高道路使用效率、缓解拥堵,很多新的交通管理措施不断被实施。例如多乘员车道(HOV车道)、潮汐车道(见图3)等。

图3 HOV车道和潮汐车道
HOV车道仅供乘坐至少某一规定乘客数的车辆通行。潮汐车道是指可变车道,即某一条车道在不同时段内行驶方向会发生变化。这些新的交通管理方案的实施主要是通过车道来实现的,而高精度道路导航地图可以精准反映这些信息,为人们提供智能导航服务。
(二)「互联网+」智能交管
道路交通执法管理具有很多难题,尤其是在执法取证和事故应急处理方面。而高精度道路导航地图可以提供新的技术手段来解决交通执法管理中的困难。
1.交警执法领域
车道级违法行为执法取证是道路执法领域的一个难点问题。车道级违法行为指移动目标相对于地面车道或其他移动目标而言,相对位置移动在一个车道级别内的、违反交通法规的行为 [13],如不按规定车道行驶等。
由于数据采集困难和现场还原困难导致这些行为目前难以执法取证。而高精度道路导航地图可以精准反映车辆行驶在哪一条车道上,因此可以对车辆是否有车道级违法行为做出准确判断,满足车道级违法行为执法取证的需求。
2.保险理赔领域
车险理赔行业长期受到骗保行为的困扰,耗费了大量的人力物力。这是因为保险人员往往只能查勘事后证据,无法判断事故的全过程。高精度道路导航地图包含丰富细致的车道信息,因此可以精准反映车辆的行驶状态,并且在地图上将事故的全过程进行还原,从而可以帮助保险人员对事故进行准确判断。
(三)「互联网+」辅助驾驶/无人驾驶
无人驾驶领域要求地图在几何上具有更细的粒度,细致地刻画道路上每个车道的详细信息。而在拓扑网络上,也要求准确表达车道之间的连接关系。高精度道路导航地图包含多个层次的几何拓扑数据,可以满足面向辅助驾驶和自动驾驶的不同层次的运用需求。
除此以外,高精度道路导航地图还包含动态要素。动态要素包括两种,一种是半实时的动态要素,它在自动驾驶领域主要用于进行全局的路径规划;另一种是实时的动态要素,主要指动态障碍物,它主要应用于自动驾驶系统实现局部路径规划。
四、高精度道路导航地图的结构与计算
(一)高精度道路导航地图结构
道路地图是对实际道路进行反映,通过特定图层来描绘特定类别,然后将图层叠加进行路面表达。终端上显示的导航地图往往由10多层甚至20多层不同分辨率的图片组成,当用户进行缩放时,程序根据缩放级数,选择不同分辨率的瓦片图(用方格来模拟实体),拼接成一幅完整的地图。高精度道路导航地图也是如此,只是它在普通电子地图的基础上包含了更多的图层数量,且每一图层的描绘更加精细。
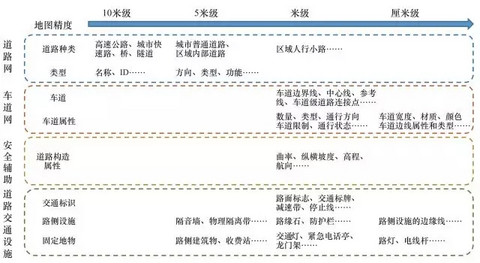
图4地图结构内容划分示意图
高精度道路导航地图由四个部分的数据构成,分别是道路网数据、车道网数据、安全辅助数据和道路交通设施数据。这四类数据构成的地图结构内容根据地图精度不同显示的内容也就不同,其基本结构划分和显示内容示例,如图4所示。
道路网主要是由道路基准线网络构成,用于描述道路的几何形态、表达与道路设施间的关系。高精度道路导航地图道路网示意图,如图 5 所示,它包括道路基准线、道路基准线连接点和路口等图层。
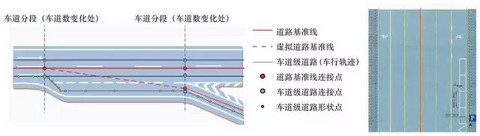
图6高精度道路导航地图车道网示意图
车道网记录路网中每个独立车道的相关属性,用于车道级的道路显示、定位、路径规划和驾驶策略辅助。它包括车道级道路、车道级道路连接点、车道级道路形状点等图层,如图6所示。
安全辅助数据和道路交通设施数据是对车道安全数据和车道上的其他交通设施进行描述,用于辅助车道级定位和显示,例如曲率、航向、纵横坡度等。
道路交通设施数据则包括交通标识、路侧设施和固定地物等信息。
(二)计算模式
高精度道路导航地图描绘的道路信息更加丰富,包含的细节更多,因此它的数据量也更加庞大。传统导航电子地图每千米的数据量约是1KB,而高精度道路导航地图每千米的数据量大约是100MB,是传统导航地图的10^5倍。而且高精度道路导航地图中的数据类型复杂多样,数据量急剧增加,并且数据处理的实时性要求较高。
所以目前以云计算模型为核心的集中式大数据处理方式已经不能满足高精度道路导航地图的数据计算要求,需要建立新的计算模型。本文提出「众包+边缘计算」模型作为高精度道路导航地图计算模式。
高精度道路导航地图的数据采集任务很艰巨,需要采集车跑过每一条道路,然后上传数据绘图。首先,这需要花费大量的时间;其次,道路上的一些信息会发生变化,高精度道路导航地图需要保持周期性数据更新,再次采集很多信息又是重复的,且耗费更多的资源。
笔者认为可以采用众包的方式解决这些问题,高精度道路导航地图的用图者同时也可以是绘图者。通过众包的方式,将数据采集设备装在使用高精度道路导航地图的车辆上,其在行驶时边用图边采集数据,并且将获取到的数据上传。这种方式可以很好地满足城市街道需要一周更新一次来反映其构造和新的交通模式的需求。美国的Mapper公司已经采用这种方式来获取地图数据。
随着物联网和5G通信技术的快速发展,有别于传统云计算的全新计算模式——边缘计算被研究者们提出。边缘计算是指在网络边缘执行计算的一种计算模型,边缘计算中边缘的下行数据表示云服务,上行数据表示高精度道路导航地图服务,而边缘计算的边缘是指从数据源到云计算中心路径之间的任意计算和网络资源[14,15]。
该计算方法是一种在靠近物或数据源头的网络边缘侧,融合网络、计算、存储、应用核心能力的开放平台,就近提供边缘智能服务,满足行业数字化在敏捷联接、实时业务、数据优化、应用智能、安全与隐私保护等方面的关键需求。
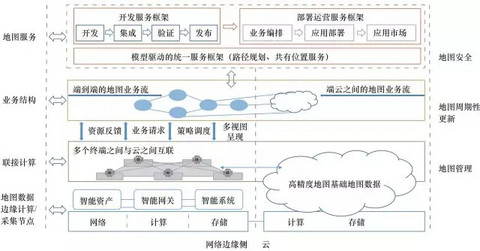
图7高精度道路导航地图边缘计算模型参考框架
针对高精度道路导航地图的情况,在边缘式计算中,由于数据量的增加以及对实时性的需求,需将原有云中心的计算任务部分迁移到网络边缘设备上,以提高数据传输性能,保证处理的实时性,同时降低云计算中心的计算负载。本文研制了高精度道路导航地图边缘计算模型参考框架,如图7所示。
五、思考
(一)标准体系框架
目前国内外从事高精度道路导航地图的测绘和生产的单位逐渐增多,但各作业单位的技术水平、采用的仪器设备、作业方法、数据处理和成果形式各不相同。不同企事业单位采用的标准也不一致。
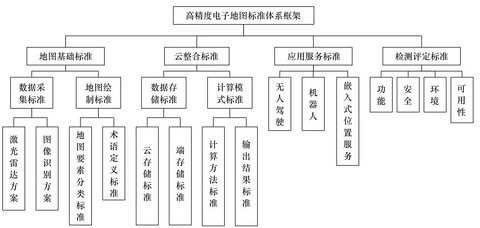
图8高精度电子地图标准体系框架
这对高精度道路导航地图的管理和共享带来了问题,因此亟需加强高精度道路导航地图标准体系框架的制定。高精度电子地图标准体系框架是形成高精度电子地图标准体系的基本单元。它包括地图基础标准、云整合标准、应用服务标准和检测评定标准四个部分,如图8所示。
(二)隐私与安全
出于对国家安全的考虑,许多国家对公共地图的信息采集与绘制也有诸多规定,包括精确度、测绘区域、机构和人员等诸多限制条件。因此需要进一步规范公共地图信息采集与高精度道路导航地图数据保护政策,在保障信息安全和鼓励高精度道路导航地图技术发展之间,找到最佳平衡点和解决方案。
(三)坐标体系的开放问题
传统导航地图都有约定俗成的电子地图版本审查和加偏移措施等加密手段,但是现在这些地图加密手段与高精度道路导航地图之间存在矛盾。因此,在未来的发展中要对高精度道路导航地图怀有创新性思维,实际应用的导航定位服务都是局部的,或许可以尝试用相对坐标系解决定位精度安全问题。
(四)及时准确地进行数据更新
传统导航地图因其商业地图公司及时、准确地进行数据更新,从而保障导航服务的准确性。而高精度道路导航地图的更新过程除了道路/车道的几何信息外,还包括交通要素在内的大量数据更新。而且,高精度道路导航地图本身就包含庞大的数据量,如果每次都通过原始采集手段进行数据更新,将会导致过多冗余数据和过高的成本。因此在未来的高精度道路导航地图发展中,采用众包手段获得用户手上的大量及时数据,是一种更加便捷、低廉、可靠的数据更新手段。
来源:厚势
本文地址:
以上内容转载自厚势,目的在于传播更多信息,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。














