
伟世通首席架构师王凯:2025年L3级自动驾驶将成为私家车标配

“2025年出行行业将有两大发展方向,一是面向L5级自动驾驶的共享汽车,另一个是私人定制化的L3级自动驾驶车辆,而且L3级私人车会逐渐成为私家车的标配。”7月1日,在2018 全球人工智能与机器人峰会(CCF-GAIR)智能驾驶专场论坛上,伟世通自动驾驶首席架构师王凯发表了以上观点。

伟世通自动驾驶首席架构师王凯
王凯在与第一电动交流时表示,目前自动驾驶领域很火,很多公司均有涉猎,但这正证明了该领域还远未成熟,大家的目标应该是共同推动自动驾驶功能落地变现,在推动出行变革的同时,大家都能够活下来。
在以“自动驾驶的乐高理念”为主题的演讲中,王凯预测,首先从自动驾驶的市场趋势看,ADAS行业将大幅增长,其中利润率最高的是中央域控制器;其次,SoC供应商在积极进入域控制器市场,例如英伟达和英特尔;最后是软硬件的分离,因为自动驾驶系统的复杂性,各个公司会从不同的侧重点进行切入,预计到2025年,自动驾驶需求量将发生质的飞跃。
另一方面,王凯预测,今后汽车行业的发展情况是谁能够把出行概念全部集成一体化,谁就会坐在圆桌的正中央,成为出行行业的NO.1。
而伟世通正在尝试做这样一件事。
“伟世通推出的DriveCore技术平台是一个合作共赢的平台,我们不需要对方把自动驾驶系统做的有多好,但要在某一个细分领域做的最好,我们把这样的‘特长生’公司召集进来,根据客户需求,把最合适的组合方案提供给对方。”王凯向第一电动介绍,DriveCore希望能够给主机厂提供一个模块化可扩展平台,允许OEM能够自由选择不同的硬件与软件、算法,就像乐高一样,最终拼出一个自动驾驶系统。伟世通的DriveCore由三部分组成:Compute(底层硬件平台)、Runtime(中间层)以及Studio(开发工具)。
“伟世通是中央域控制器公认的NO.1,但我们现在要做的不是木板,而是木桶,伟世通希望联合其他的特长生将自动驾驶进程快速推进,这是伟世通现在的愿景。”
以下为王凯主题演讲原文:
今天分享的主要内容是,伟世通在自动驾驶的整个开发过程中的思路以及要达到的目标。现如今,自动驾驶是一个很火的话题,很多公司都有涉猎。而伟世通的思路是从市场调研开始研究,找准定位,再把产品迅速落地,因此要先把当前市场分析清楚。
2025年自动驾驶需求量将发生质的飞跃

首先从市场角度出发,我个人在手机行业做了十多年的工作,发现现在的功能汽车向智能汽车的转变,类似当年的功能手机转化为智能手机。目前整个汽车产业的状况还是树型结构,也就是以OEM为核心,因为它们控制了内燃机的核心技术,所以汽车的整个产业链是由OEM直接定义的。例如整个链条的下游企业拿多少份额,完全是由控制最核心技术的人员决定,过去的30年亦是如此。
但是现在汽车行业发生了重大改变,自从英伟达的芯片使自动驾驶功能落地变现,整个产业链由以前的树型结构逐渐向环形结构发生剧变。
环形结构是什么?其实就是OEM不再担任核心角色,而是所有参与者渐渐地都能坐在圆桌上讨论议题,尤其是汽车的自动化、轻量化、网联化和智能化方面。今后汽车行业的发展情况是谁能够把出行概念全部集成一体化,谁就会坐在圆桌的正中央,成为出行行业的NO.1。此外,在SAE L1级到L5级自动驾驶的时间轴上,大家都形成了统一的认识,2005年开始了L1级,奥迪目前能实现L3级,甚至有些OEM的L4级自动驾驶功能会在2021年左右落地。

从市场趋势来看,ADAS行业将大幅增长,其中利润率最高的是中央域控制器;SoC供应商在积极进入域控制器市场,例如英伟达和英特尔;软硬件的分离,因为系统的复杂性,各个公司会从不同的侧重点进行切入,预计到2025年,自动驾驶需求量将发生质的飞跃。

目前SoC厂商已经逐渐介入域控制器市场,奥迪也推出了首款L3级交通堵塞导航系统。另外,2025年出行行业将有两大发展方向,一是面向L5级自动驾驶的共享汽车,另一个是私人定制化的L3级自动驾驶车辆,而且L3级私人车会逐渐成为私家车的标配。
自动驾驶所面临的挑战上,主要有如下三个方面:
系统设计的复杂性。目前存在两种声音,一种是OEM认为自身在汽车行业的长期积累,有很大的优势,认为初创企业缺少经验;另一种声音是初创企业认为传统OEM已经跟不上时代发展的脚步了。其实,自动驾驶系统是一个非常复杂的系统,OEM和初创公司经历的痛点时间不同,OEM最早经历的痛点是与功能安全和网络安全相关,而初创企业更早接触的是基于AI的算法。所以说,自动驾驶的整个系统就像一个木桶一样,只要有一根短板就把水漏完了,这才是自动驾驶最大的挑战;
解决方案的多样性。目前很多自动驾驶算法的解决方案正在慢慢趋同,但由于该领域的火爆发展,其解决办法会逐渐增多;
自动驾驶落地的最大挑战问题-成本。

在传感器领域,自动驾驶技术的发展趋势:
摄像头:增加灵敏度、分辨率和帧速率将导致更高的数据可用性和急剧增加的数据量;
雷达:将提供更多、更高分辨率的信息,允许以类似于摄像头和激光雷达的方式处理雷达数据;
激光雷达:在同一范围内的数据输出与最先进的CMOS摄像头相同;
IC:计算能力将随着未来传感器产生的数据而增强,由于L3级及以上等级的自动驾驶需求,进而使可达到ASIL D(汽车安全完整性等级,D 级为最高等级)自动驾驶安全等级的IC的数量不断增加;
本地化、绘图、互联和云:由于L3级及以上等级的自动驾驶需求带来的快速增长。
此外,我们预计到2025年,高速公路上的L3级车辆将成为自动驾驶最大的细分市场,因为它面向的是从OEM到普通用户,发展趋势非常明显。

明确了自动驾驶系统的问题之后,如何解决这些问题,并研发出解决上述问题的自动驾驶系统,是一个亟待解决的命题。
问三个问题:一是系统要开放还是封闭,开放系统灵活性强,封闭系统更新快;二是系统到底灵活还是定制;三是商业化落地,如何把自身的优势发挥到极致。
伟世通乐高化自动驾驶方案
基于这些比较重要的细分市场,我们就有了DriveCore概念。

DriveCore是希望能够给主机厂提供一个模块化可扩展平台,允许OEM能够自由选择不同的硬件与软件、算法,就像乐高一样,最终拼出一个自动驾驶系统。DriveCore由三部分组成:Compute(底层硬件平台)、Runtime(中间层)以及Studio(开发工具)。
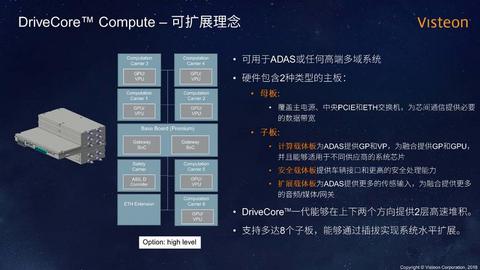
Compute,模块化可扩展的硬件计算平台,与其他厂商推出的计算平台不同的是,它不依赖于某个特定的中央处理单元,可支持多种处理器;
Runtime,是车载中间件,提供安全框架,实现在不同硬件之间、算法与应用之间的数据通讯;
Studio,是提供给开发人员的基于PC的软件开发工具。
要想让自动驾驶系统乐高化,从系统角度来看,关键就是将硬件与软件剥离,系统架构可以将来自不同供应商的算法运行在不同的硬件平台上,这样才能够像乐高积木一样,让主机厂根据需求来自主选择合适的积木。而实现这个就是底层的通用硬件平台与车载中间件。
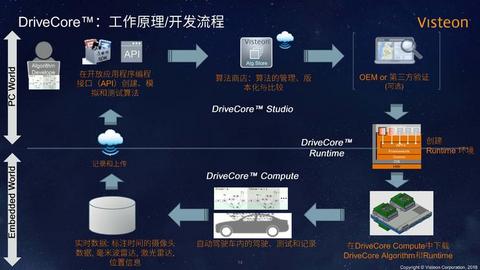
整个开发流程,无论是OEM还是第三方的开发者拿到API的SDK后,可以在没有任何硬件的条件下设计,我们的硬件不绑定任何SOC,但支持常见或者初创的SOC。
认清自身的长项,并做到极致,就可以更早坐在圆桌上。伟世通的优势是多年在汽车行业的积淀,无论是硬件公司还是算法企业,我们都有密切的合作,深知主机厂的需求,充当中间人的角色,将互联网公司纳入供应商序列,同时自己通过平台,打包整个技术方案,或者让整车厂参与开发(取决于整车厂的意愿)。

伟世通的下一步计划,针对Studio和Runtime的不同算法进行优化,然后编译到相应硬件环境中。其实要能够支持不同的硬件,需定义好一个通用的架构,然后在这个架构的基础之上,通过统一的接口定义实现扩展性,增加对不同硬件的支持。伟世通的硬件由两部分组成:
机板:提供安全性满足需求的电源,互联功能(以太网)及其他可扩展功能;
子卡:用统一的硬件接口定义,可以使用不同的SoC或者MCU,只要符合接口协议就行,子卡板会做成通用大小,统一标准化,便于扩展。
SmartCore 最核心的概念就是将多个 ECU(电子控制单元)集成在单一域控制器内,可带来体积、功耗和成本优势。DriveCore 则是在这一基础上的另一个延伸。自动驾驶汽车既然由机器控制,就可能存在安全隐患。所以DriveCore 必须有极高的安全性,并且达到 ASIL D 级别。
因此车载中间件将发挥非常重要的作用,它相当于一个中间交互层。由于自动驾驶系统是一套复杂的系统,需要多个 SoC 同时操作,多个 SoC 之间高速互联,并且保证低延迟。换句话说,如果一套系统不能保证数据实现精准传输,那么安全性就会大打折扣。
DriveCore 的设计理念针对的是自动驾驶复杂性和多元性带来的挑战,目前许多自动驾驶公司的算法不尽相同,所以不同算法在不同硬件表现形式也有所不同。自动驾驶系统的复杂性,决定了它必须使用不同公司的技术模块,但目前没有任何一种算法和硬件可以最高效完成所有事情。所以灵活性设计显得尤为重要,伟世通采用乐高理念,灵活处理多元性和复杂性的自动驾驶系统。
安全性角度讲,最佳的办法是在不同的硬件运行不同的操作系统和不同算法,这样系统同时失效的几率是最低的。同时,我们在中间层、应用层提供 API,OEM 可以通过 API 来开发自己想要的产品。
最后想说的是,当前有各种各样的方式切入自动驾驶领域,但最佳方式一定是取长补短,找准自己的位置,与合作伙伴一起坐到圆桌上,实现经济效益。
来源:第一电动网
作者:宋爱菊
本文地址:
本文版权为第一电动网(www.d1ev.com)所有,未经书面授权,任何媒体、网站以及微信公众平台不得引用、复制、转载、摘编、以其他任何方式使用上述内容或建立镜像。违反者将被依法追究法律责任。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。














