
广东工业大学开发出融合SLAM系统 增强双足攀爬机器人感知和定位能力

盖世汽车讯 攀爬机器人在现实世界中可能有许多有价值的应用,从完成屋顶或其他高层建筑的维护任务到为难以到达的地点运送包裹或救生包。然而,为了成功部署在现实世界中,这些机器人应该能够有效地感知和绘制周围环境,同时准确预测它们在地图环境中的位置。
据外媒报道,广东工业大学的研究人员最近开发出新方法,可以增强双足攀爬机器人在攀爬桁架(即由直互连元件组成的三角形系统,可以是桥梁、屋顶或其他人造结构)。相关研究论文发表于期刊《Robotics and Autonomous Systems》,详细介绍了基于同步定位与建图(SLAM)算法。
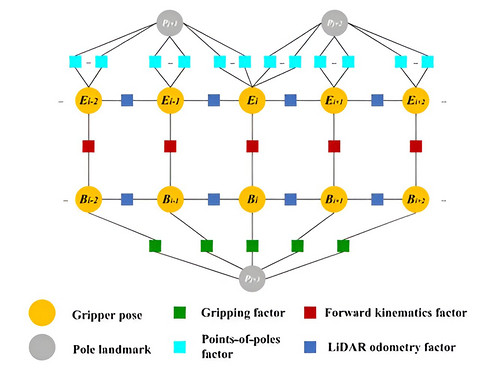
图片来源:期刊《Robotics and Autonomous Systems》
“我们最近的工作将SLAM方法部署到一个特定的双足攀爬机器人(BiCR)上,该机器人由我们的实验室(名为仿生和智能机器人实验室)开发,”该论文的合著者陈伟楠表示。
“BiCR是一种类似于移动机械手的机电系统,能够通过两端的夹具进行移动并通过多个关节进行旋转。该机器人可用于高空和高风险环境中的安装、维护和检查,例如作为建筑工地脚手架和电力塔。”
来源:第一电动网
作者:盖世汽车
本文地址:
以上内容转载自盖世汽车,目的在于传播更多信息,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。
相关内容

全部评论·0
暂无评论










