
卡内基梅隆大学通过绘制轨迹来教机器人移动

盖世汽车讯 即使让机器人完成一项简单的任务,也需要进行大量的幕后工作,其中一部分挑战是计划和执行动作,如转动轮子和举起机械臂。为了实现这一目标,机器人专家与程序员合作开发出一套无障碍、可供机器人使用的轨迹或路径。据外媒报道,卡内基梅隆大学(Carnegie Mellon University)机器人研究所(RI)的研究人员正在开发新的方法以绘制这些轨迹。
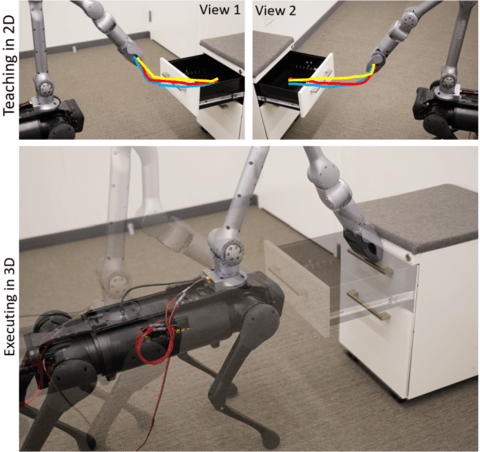
(图片来源:卡内基梅隆大学)
RI博士后研究员William Zhi等人提出使用草图向机器人展示如何移动的方法。该团队将在日本横滨举行的IEEE国际机器人与自动化会议(IEEE International Conference on Robotics)上展示他们的工作。Zhi表示:“传统的机器人运动轨迹生成方法需要对机器人进行特定的编程。人类可以通过草图推断复杂的指令,我们希望机器人也能做到这一点。”
最近已有探讨使用自然语言来控制机器人的初步工作,但研究人员主要是测试不同的方法来教机器人通过演示进行学习。有两种主要的方法可以做到这一点,一种方法依赖于动觉教学,即人类记录机器人走到哪里,然后对机器人进行物理调整,将其关节置于所需的位置;另一种方法是遥操作,用户通过专用的遥控器或操纵杆来操作机器人,然后记录演示过程以供机器人模仿。
来源:第一电动网
作者:盖世汽车
本文地址:
以上内容转载自盖世汽车,目的在于传播更多信息,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。
相关内容




全部评论·0
暂无评论










