
腾讯机器人实验室开发出新框架 使四足机器人能够像动物一样敏捷地移动

盖世汽车讯 四足动物天生就具有敏捷和适应性强的运动能力,因此能够在各种地形上移动。在过去的几十年里,世界各地的机器人专家一直在尝试在四足机器人中有效地重现这些动作。
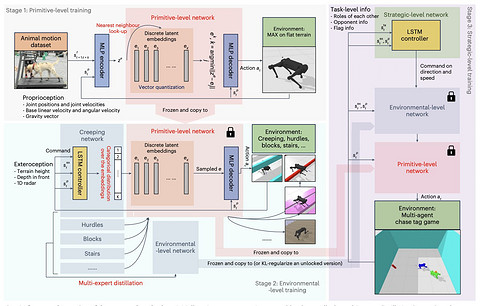
通过强化学习训练的计算模型在实现四足机器人敏捷运动方面取得了特别有希望的结果。然而,这些模型通常是在模拟环境中训练的,当它们应用于现实环境中的真实机器人时,性能有时会下降。
实现敏捷四足运动的替代方法是利用运动传感器和摄像机收集的动物运动镜头作为演示,用于训练控制器(即执行机器人运动的算法)。这种被称为“模仿学习”的方法能够在某些四足机器人中重现类似动物的动作。
来源:第一电动网
作者:盖世汽车
本文地址:
以上内容转载自盖世汽车,目的在于传播更多信息,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。
相关内容

全部评论·0
暂无评论










