
华为ADS 3.0端到端智驾更安全更类人

汽车智能化浪潮加速袭来,智能驾驶规模化商用开启,而2024年也被誉为整车智能驾驶的元年。
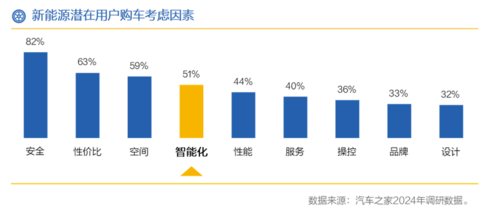
这在智能化供需两侧的升级提速上体现得淋漓尽致:上半年上市新车L2级及以上智驾能力标配率逼近60%;而汽车之家的用户调研数据也显示,新能源潜在购车用户将智能化作为主要购车考虑因素的比例突破50%,这一数字在以往的年份仅约30%。
智能驾驶成为整车新的价值增长点,而智驾能力也成为企业建立差异化竞争力的关键。
这一轮智能化趋势的升级提速,自然离不开众多企业在智能化领域的大力投入与持续深耕,而在智能头部企业中,作为智能驾驶产业的引领者与标杆企业的华为表现自然可圈可点。
凭借着深厚的技术积累,华为一直坚定地保持在智能驾驶领域的持续投入,其高阶智能驾驶系统ADS 1.0在2021年的上海车展中一经亮相,便掀起了整个行业的智能化热潮;在2022年更是率先发布了“全国都能开,有路就能开”;到今年ADS 3.0,首发“车位到车位,全场景贯通”,可以说华为一直走在行业的前列,引领着产业的持续升级。
■完备的软硬件能力构建垂直深度整合优势
华为凭借在ICT领域长期积累的核心工程能力,芯片、传感器等硬件自研能力以及操作系统、智能驾驶算法等软件能力,构建了完备的垂直整合能力矩阵,形成了深度垂直整合优势。
在芯片能力上,华为专门为自动驾驶设计的芯片利用率可以提升到70%,而其他厂家的芯片利用率仅为30%,这也是为什么华为ADS用1 TOPS的算力,能跑出别人2 TOPS算力甚至更好效果的原因,这便是垂直深度整合的优势。
在传感器自研方面,华为的布局包括毫米波雷达与激光雷达(量产最高线数的激光雷达),同时坚定地选择多传感器融合的技术路线,使得不同的传感器形成优势互补,在提升感知距离的同时,也能应对多种恶劣天气和不同光照强度的影响。
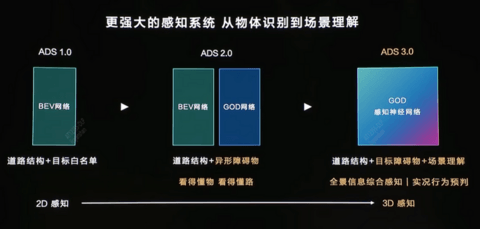
在算法能力上,首先看感知算法。感知是智能驾驶起步的核心,再强大的后端技术也要依赖于感知能力。华为的感知算法从BEV到GOD,经历三次迭代:ADS 1.0主要采用BEV+Transformer算法;ADS 2.0利用GOD网络,具有通用障碍物的检测能力;迭代至3.0,则是把BEV和GOD融合为更大的GOD网络。算法虽然发展迭代迅速,但基本都为公开资源,工程化落地能力才是关键所在。
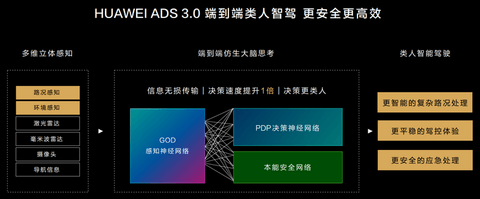
再看后端网络,华为采用从GOD网络到PDP网络的端到端技术架构。因为端到端有它自身的局限性,即上限比较高,可以处理一些复杂的场景,但下限也比较低,简单的场景反而难以处理。基于安全优先的考虑,华为特别地引入了本能安全网络,这是其与业界其它端到端模型的主要区别点。本能安全网络的机制,通俗点讲类似于手碰到了火苗,会本能地收回来,其在安全方面的应急处理能力会更迅速和及时。
在云端算力积累上,华为当前的算力水平达到5E FLOPS,3500万+公里,实现每天学习,每5天迭代一次,处于国内智驾第一梯队的头部水平,云端算力是算法可以快速迭代的保证。
■超强的感知、响应、验证与底盘垂直整合能力保证安全水平持续升级
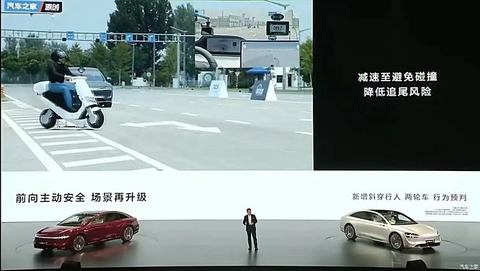
在安全能力上,ADS 3.0首创的“前向+侧向+后向”360度的全向主动安全,建立了安全新标杆,从系统后台数据积累上看,避免可能的碰撞次数已达45万次。

前向的安全系统,ADS 2.0只支持同向和横穿,3.0支持同向、横穿、逆向和斜穿,在安全保障能力上进一步升级。
侧向的安全系统,ADS 2.0也可以做一些避让,但是避让会更机械一些,是先转向再制动,而3.0则是边转向边制动,这样体验更丝滑。另外,在没有看到外面行人的场景,eAES增强型自动紧急转向就可以守护安全。
ADS 3.0进一步地考虑了更多的综合因素,除了前面环境的感知和车速以外,还会依赖于路面的丝滑程度,以及路面附着力评估与底盘联动,寻找最佳的制动时机和力度,比如保证在湿滑路面能够刹得稳、刹得住,还有防误踩加速踏板,呵护更周全。
华为通过四大核心能力的积累,保证安全能力持续领先。第一,多传感器融合,超强感知,第二,超快响应,PDP的网络和本地的网络响应都超过了人类的平均反应时间。第三,超前闭环,云端回归,使实际的效果与预想的结果一致。第四,与底盘垂直整合,不仅考虑整车和安全,还希望形成最佳的合纵联合的控制点,使安全更有保障,体验更顺畅。
从2021年的ADS 1.0到如今的3.0,华为在智能驾驶领域持续地引领行业。从未来发展来看,4.0将推动高速L3的商用与城区L3的试点,而终极目标则是L5。
■途灵平台致力于用户操控、舒适、安全与智能体验的全面升级
途灵平台的概念在2023年11月份推出,主要基于操控舒适、安全和经济性目的开发。从用户的需求场景出发,去解决真实场景中存在的问题。在鸿蒙智行系车型产品上,途灵平台通过智能化赋能,帮助整车在响应速度、舒适型、操控性上得到大幅优化,产品更安全、更舒适、更好开。
平台核心包括四大部分,包括iDVP的数字底座、多模态融合感知、电机扭矩的控制以及超高性能的协同控制。

iDVP如何定义?座椅、后视镜等这些都是常规的车身的功能键,以前传统的油车,每一个功能键里边都会有一个控制器,它们是分别独立控制的,而途灵平台通过几个域控制器再加上VDC,由车载以太网的连接把这些东西集中控制起来,可以减少线束,同时也精简了跨域控制调用的复杂度,提升了整车场景响应速度。有了域控制的概念,就可以线上通过软件升级去做对应的一些域控制硬件逻辑和算法的升级,最终会将升级效果延展到应用层,实现整车化的场景功能OTA,做到常用常新。
途灵平台的多模态融合感知,一是车自身状态的感知,另外是路面外环境的感知。车上的传感器很多,普通的轮速、方向盘角度、倾角和束角等这些,车外环境对应的则有坡度、路面的感知数据等。现在有了智驾之后,通过视觉雷达等一系列的感知元器件,通过这些感知数据的融合,最终实现在不同场景下,实现纵向车速上可以去做不同的选择。例如在加速和刹车的时候,如果路面不平,不同轮子的轮速可能是有差异的,那么在起步的时候应该以哪一个轮子的轮速为准,通过感知数据可以来做精细化的控制,使得用户的乘坐舒适性更好。
途灵平台的自适应扭矩系统,以前发动机只调转速,现在电机能控制扭矩,它的控制会更精密更精细。包含矢量控制,以及电子防滑,协同拖曳扭矩控制。
这个扭矩控制不管是在麋鹿还是环型转向场景下,对整车性能提升很明显。
例如在入弯的时候碰到转向力不足就会有推头,出弯的时候调不好就会甩尾,通过把前后扭矩做再分配,比如说入弯的时候要减少前轮的输出,更多的用在转向,出弯的时候需要把动力拉出去再把扭矩往前调。
途灵平台的电子防滑主要是针对用户场景,包括减速带、坑洼、砂石环境,通过控制对路面感知的响应,还有轮速的调整时间,来提升在这些路面上的舒适度。
一般新能源车相对燃油车的跨域控制效率会提升4倍,鸿蒙智行途灵平台还可以进一步地把它提升,每一个电机是有自己的域控制器,形成一个小的域内闭环,整体则形成一个大的闭环,大的闭环主要是做整体的协同控制,小闭环可以快速地域内调整轮速。
途灵平台的协同拖曳扭矩控制,一般新能源车在低温或者是在充满电的情况下会感觉能量回收减弱,这个时候用户仍然按照亏电能量回收的惯性去制动,会产生制动不足,有一定的安全风险。在满电的情况下电充不进去了,电机的回收能力减弱,这个时候通过电液协同的机制,在电机减弱的时候把液压做相应的平衡,获得和能量回收时一样的减速体验,提供跟正常的情况相当的拖曳力,途灵平台就解决了这个安全隐患。
自适应减震控制,通过轮速调节,还有悬架本身的调节,实现不同路面上的精准控制,包括前后轴,举一个典型的例子,在过减速带的时候,首先前轮需要快速地通过,希望后轮缓慢的通过,从而减少振动,这里通过前轮、后轮调软,使得过减速带的时候更加的平缓。
智能舒适制动,以舒适制动的技术,来缓解电车晕车,通过在阻尼上的调节,通过车身俯仰控制,减少车身的晃动,在车身的悬架去做软硬适配的调节来减少俯仰。
华为对于途灵平台的愿景展望,是为合作伙伴和他们的产品赋能,为用户带来更好的体验,拥有极致的操控和舒适享受,乃至更佳的安全、服务和智能化体验,未来将通过一系列的技术布局,把更丰富、更佳的体验带给用户。(文/汽车之家行业评论员)
来源:第一电动网
作者:汽车之家
本文地址:
以上内容转载自汽车之家,目的在于传播更多信息,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。














