
挑战特斯拉FSD、杀入Mobileye腹地,告别激光雷达,百度Apollo推出领航辅助驾驶ANP


L4 级无人驾驶什么时候能够实现大规模量产,今天还没有人可以给出准确答案。
但 L4 研发带来的技术提升,已经可以为 L2、L2+ 的辅助驾驶功能带来巨大的体验提升。
今天(12月8日)在广州举行的第二届百度 Apollo 生态大会上,百度最重磅的发布当属Apollo Navigation Pilot,简称ANP。
这是一套基于 L4 级无人驾驶技术,降维量产的「城市全场景自动驾驶量产解决方案」。
ANP 基于 10 个摄像头的纯视觉感知方案,利用不到 30 Tops 的算力,能够实现城市道路场景下的红绿灯识别、环岛绕行、无保护左转等自动驾驶能力。
百度希望借助这套方案,大幅提升量产自动驾驶系统的用户体验,帮助车企打造下一代领先的智能汽车。
此前百度 Apollo 已经推出了 AVP 自主泊车解决方案,借助 AVP 和 ANP,百度 Apollo 希望在未来 5 年内实现 100 万辆车型的前装搭载。
1、更轻量化的 Apollo Lite,能力更全面的 ANP
ANP 是基于百度的纯视觉 L4 级方案 Apollo Lite 产品化形成的自动驾驶系统。
Apollo Lite 最早在 2019 年的 CVPR 大会上亮相。
这套纯视觉的 L4 级方案,摆脱了对激光雷达传感器的依赖,最大限度发挥了视觉感知的潜力,能够实现城区道路自动驾驶、红绿灯识别、无保护左转、环岛通行等自动驾驶能力。
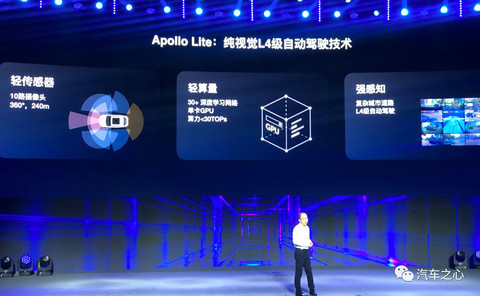
相比于传统 L4 方案,Apollo Lite 更为轻量化,这里的轻量化主要体现在「轻传感器以及轻算量」:
这套方案的主传感器是 10 路摄像头,采用纯视觉感知;
在算力需求上,这套方案的要求没那么高,单一 GPU 显卡就可以支撑,整体算力需求小于 30Tops。
据百度 Apollo 技术委员会主席王亮在当时介绍:
Apollo Lite 方案能够支持对 10 路摄像头、200 帧/秒数据量的并行处理,单视觉链路最高丢帧率能够控制在 5‰(千分之五)以下,实现全方位 360° 实时环境感知,前向障碍物的稳定检测视距达到 240 米。
而且,在那个时候,Apollo Lite 就已经在进行实车测试。
一年后,百度 Apollo 正式将这套方案推向市场,也就是 ANP。
目前在市面上,与 ANP 类似于的领航辅助驾驶系统,还有特斯拉 NOA、蔚来汽车 NOP 等等。

相较于这些同类型产品,ANP 有着几大明显的差异:
其一,ANP 系统的应用场景更广,能够支持高速公路、快速路以及城市普通道路的自动驾驶。
相较于 NOA、NOP 等系统,用户在使用 ANP 进行领航辅助驾驶时,场景上有更大的自由度。
其二,相较于没有采用高精地图的特斯拉 NOA ,ANP 搭载了百度自研自采的高精地图。有更好的感知冗余。
其三,ANP 支持车路协同,这也是百度 Apollo 的一大技术特色。Apollo 目前在一些城市建成了车路协同技术覆盖区域。
当搭载 ANP 系统的车辆行驶到这样的区域时,通过与路端设施的协同,此时,车辆便化身成为 L4 级的 Robotaxi,为用户带来全无人驾驶的体验。
目前在国内,类似的高阶智能驾驶方案,基本上只有华为的高阶自动驾驶解决方案ADS,但 ADS 方案采用了激光雷达传感器。相比于纯视觉的方案,可能在落地速度以及量产成本方面,会有一定的差距。
综合来看,ANP 找到了技术领先性以及量产可行性之间的一个平衡点。
这个平衡点背后是百度这么多年在自动驾驶、高精地图以及车路协同技术上的积累。
2、AVP+ANP,全场景自动驾驶可量产
百度 Apollo 在今年 9 月举行的百度世界大会上对外展示了其可量产的 AVP 自主泊车系统,这套系统也是将 L4 级自动驾驶技术降维到泊车场景进行应用。
新造车四小龙之一的威马汽车,将率先和百度合作量产这套AVP系统。
今天在百度Apollo生态大会现场,双方合作的这款智能纯电SUV也公开展出,计划是明年上市交付给消费者。

在软硬件配置上,双方合作的车型上还搭载了 5 个毫米波雷达、5 个摄像头以及 12 个超声波传感器,Apollo 还为这套 AVP 系统提供完整的自动驾驶算法以及泊车控制器——ACU 平台。
这套 AVP 系统可完成在无人干预情况下的自动驾驶、躲避障碍物、车位智能搜索和自主泊入、泊出等功能。
简单来说,用户只要把车停在停车场的入口,车辆便会自动驶入停车场内,寻找并泊入可停靠的车位。而且,这套系统还支持公共停车场跨层自动泊车。
既有的 AVP 方案,在叠加百度 Apollo 此次发布的 ANP系统,便形成了一套城市环境下点到点的自动驾驶解决方案。
百度在今天还公布:
在泊车端,百度 Apollo 已经就 AVP 系统和威马汽车、长城汽车以及广汽达成合作,后续将陆续推出量产车型。
在行车端,目前 Apollo 还没有给出 ANP 系统的合作对象以及具体的量产计划。
但现场的演示视频我们可以看到百度已经在至少一款 SUV 上进行实车测试。
百度预计,未来 5 年搭载 AVP+ANP 系统的量产车型将达到 100 万辆。
我们也期待着未来 AVP 系统和 ANP 系统「双剑合璧」,为车辆带来颠覆性的自动驾驶体验。
3、百度 Apollo 实现城市全场景自动驾驶能力的底气
泊车端的 AVP 能力,加上行车端的 ANP 系统,两套系统量产后,基于百度 Apollo 方案的车辆就可以实现城市全场景的自动驾驶了。
而且整套系统将不依赖激光雷达传感器,具备更高的可量产性;成本方面也因此能更大程度压缩,适合于消费级别车型搭载。
AVP+ANP 双系统的量产,值得期待。
两套系统推出背后,是百度在自动驾驶上长达 7 年的技术积累和探索。
根据最新披露的信息,百度 Apollo 测试车队规模已达 500 辆级别,测试里程总计超过 700 万公里,获得测试牌照总计超过 190 张,其中载人测试牌照超过 120 张。
就在这次生态大会前几天,百度 Apollo 还拿到了北京市自动驾驶测试管理联席工作小组颁发的首批 5 张无人化路测(第一阶段)通知书。
这意味着百度 Apollo 可以进行无人驾驶的道路测试。
而且,百度 Apollo 也是中国唯一一家在多城开启 Robotaxi 运营的公司。
多地载人运营必然进一步推动自动驾驶车辆在真实场景中获得数据反馈,加速技术迭代。

就在这届生态大会上,百度 Apollo 宣布即将在广州部署 Robotaxi 车队,还与广汽合作基于埃安车型打造 Robotaxi 运营车辆。
无论是虚拟场景测试还是真实道路测试,都对百度 Apollo 在自动驾驶算法的提升有着巨大的推动作用。
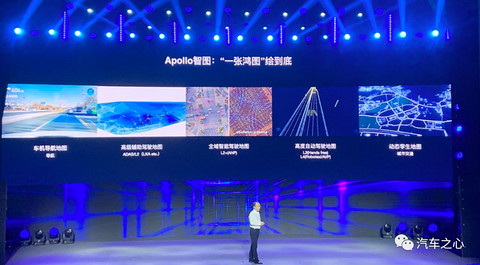
在 AVP、ANP 这样的系统上,高精地图扮演了重要的角色,而百度 Apollo 早有积累。
在商业化应用方面,百度的高精地图已经被蔚来、威马、广汽、长城等车企采用,实现在量产车型上的搭载。
目前,百度高精地图已经完成了全国范围内高速和快速路的数据采集。本届大会上,百度还预计在未来 3 年内搭载其高精地图的车辆将超过 100 万辆。

在自动驾驶硬件方面,百度 Apollo 也有所布局,其自研的 ACU 自动驾驶计算平台目前已经量产。
ACU 是百度 Apollo 在 2018 年的 GTC 大会上发布的计算平台。
它根据不同场景的计算能力需求,共分为三个系列产品,包括:
ACU-Basic
ACU-Advanced
ACU-Professional
能够支持 5 路摄像头,12 路超声波雷达,预留毫米波雷达和激光雷达接口。
其中,ACU-Advanced 是自主泊车产品AVP 专用车载计算平台,也是百度 ACU 系列的先发产品, ANP 系统也将基于ACU 的计算平台上进行量产。
所以综合来看,在软件算法、高精地图、计算硬件以及大规模测试等方面,百度 Apollo 为AVP和ANP的量产已经做了多年的准备。
4、百度 Apollo:帮助车企打造下一代的智能驾驶系统,成为智能汽车的顶级供应商
2020年,全球车市正经历技术转型和疫情冲击下的双重剧变,智能化成为今年行业内最关键的投入领域。
而面向用户的软件,作为汽车上新兴领域,在当前市面上,能够帮助车企向用户提供优秀智能化体验的供应商依然是非常稀缺的。
百度 Apollo 在商业化进程中:
一边是推动 Robotaxi 的多城运营,做无人化出行的服务商。
另一边是打磨自动驾驶技术,推出 AVP、ANP 这样的量产自动驾驶功能,成为车企的好伙伴、得力供应商,帮助他们打造好用的智能驾驶功能,让他们在应对汽车自动化变革的过程中时刻保持领先。
其实这也是百度 Apollo 在自动驾驶领域一直坚持的「攀登珠峰、沿途下蛋」的策略。
ANP 系统就是途中孵化出的一颗金蛋,未来将持续为车企打造高级别自动驾驶提供最有力的支持。




















