
蔚来ES6「夜游动物园」,原来这就是激光雷达「眼」中的世界?


昨天艳阳高照的中午 11 点 25 分,蔚来发布了一条「夜游动物园」的视频。

视频中观众化身激光雷达,坐在开启了 NIO Pilot 辅助驾驶的 ES6 前风挡玻璃顶部,以点云画面为视觉呈现,感受了一把激光雷达视角逛动物园。
1 分 36 秒的视频,展现了蔚来所搭载的激光雷达,拥有看得远、看得清、识别精确、动态识别等能力,帮助用户在夜晚光线不佳的情况下,及时作出相应的制动措施。
这条视频中所展现的画面,背后是蔚来想要向公众宣传怎样的智驾感知能力?
跟随 ES6 激光雷达的视角走过 1 分 36 秒之后,有那么两个画面让我们印象深刻。
一、1550nm,500m
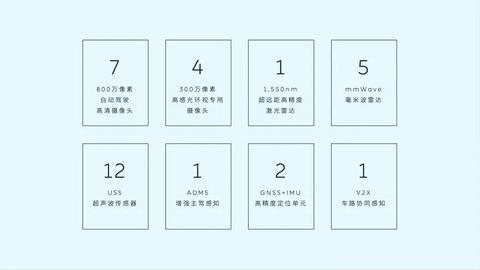
视频中,「猎鹰」带着观众进入激光雷达视角后,展现的第一个场景,是十个车道组成的最远探测距离 500m 的点云画面,清晰显示了车辆行驶车道的走向、近 100 米的动物、道路两侧的环境等信息。

蔚来 ES6 搭载的,是图达通超远距离高精度激光雷达,这款激光雷达是全球首款实现大规模量产的 1550nm 激光雷达。
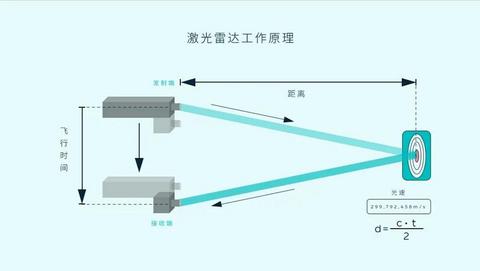
激光器发射光束脉冲,打在物体上并反射回来,接收器接收后依据反射回来的传播时间,计算出车辆和反射物的距离,这是激光雷达的工作原理,但不同波长的激光雷达各有特性。
通常情况下,人眼可见波长范围为 380-760nm,1550nm 激光大大超出了人眼识别范围,无法在人眼视网膜上聚焦成点,且激光在通过眼球过程中大部分都会被水吸收,因此几乎不会对人眼造成伤害,但市场更流行的 905nm 激光则有在视网膜上聚焦成点的可能,需限制输出功率。
1550nm 激光雷达的优势就在于此,能够在保护人眼的前提下,输出更高功率,实现更远距离的探测,因此,这台图达通激光雷达,可以在蔚来车型上实现 500m 的最长探测距离。
此外,在更精细地对物体进行识别上,1550nm 同样具有优势。
1550nm 波长激光拥有更强的抗干扰能力、更好的光束准直度、更高的光源亮度,这几个优点也让激光的发射和接收更高效,可以实现更精细的物体识别。
1550nm的光束发散角要比 905nnm 小,发散角越小,光束传播就越近,与之相伴的,还有光斑越小,1550nm 波长激光的光斑非常小,在 100 米外光斑直径仅为 905nm 的四分之一。

激光器通过一定的发散角发射出的激光,在被测物体表面形成的,就是光斑。光斑面积影响了激光打到被测物体上的光功率密度,最终影响从被测物体反射回接收器表现的入射光功率。
小光斑拥有大能量,同时其能够在一定程度上避免光斑打到两个物体,导致激光雷达无法解码区分两个物体的问题。1550nm 能在探测 100 米处的行人时,可以接收到横排 4 个点,纵排️ 7 个点的脉冲,清晰地探测到行人的姿态。
而 1550nm 采用的是光纤激光器,发出的光能量密度高、亮度强,不易受太阳光等影响,在抗干扰上有更好的表现。
1550nm 的高功率,同时让蔚来搭载的图达通激光雷达,在更低反射率的标准下,探测距离更有优势。比如业界常用的 10% 反射率标准下,蔚来 NT2 车型探测距离可达 250m,而部分车型在相同下,只能做到 100-200m。
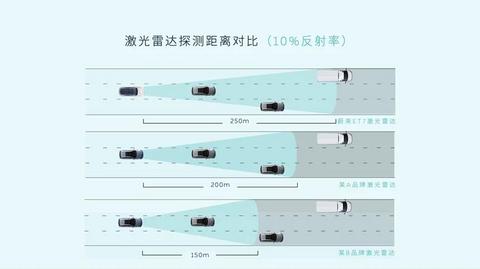
这意味着,在遇到危险状况时,蔚来的激光雷达能够给到行车电脑更长的预判、制动时间。譬如,在时速 144km/h 的情况,250m 的反应时间为 6.25s、200m 为 5s、150m 为 3.75m。
激光雷达的效用能够通过智能驾驶、AEB 等功能反馈给用户,最与生命息息相关的 AEB 领域,毫秒之间都是致命因素。
二、0.06°x0.06°
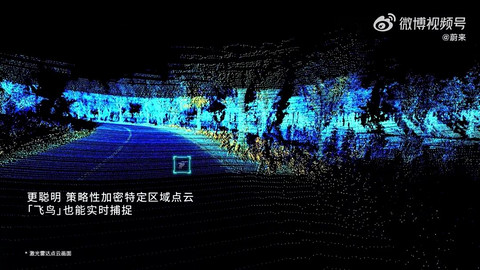
第二个令我们印象深刻的画面,是一只飞鸟闯入激光雷达的视角中,这一运动中物体的点云密度,要高于其他物体。
就像人眼一样,对于需倾注注意力的事物,会将目光聚焦于此,紧盯着该事故的动向,也就是「定睛凝视」,但不同于人眼的是,机器的判断更为理性、有策略。
蔚来车型搭载的激光雷达,通过「定睛凝视」功能,能够在视场局部产生角分辨率为 0.06°x0.06° 的高密度点云,获得更精确的三维信息。
功能的范围为 25°H(横向)x9.6°V(纵向),形象点说就是,在前方 50m 处,可横向覆盖 10 条车道,纵向覆盖大于一层楼的高度。
当然,视频中的飞鸟可能是为融合动物园场景与视频效果,特地选择的非传统物体。在我们更日常的行驶过程中,「定睛凝视」追踪的是车辆、行人、路面坡度及弯道变动,也包括抛洒物、落石、轮胎等障碍物。
但这并不意味着要盲目追求更小的角分辨率,因为角分辨率过小,会对域控算力造成压力——比如你盯着路边的小猫小狗,会容易走神忘记观察路上更重要的行人和车辆;但角分辨率过大,又不足以做到对物体细节的探测与识别——又比如你站在高处「一览众山小」时,难以看到下方建筑的具体细节。
蔚来和图达通需要在「平衡」上做到更多。
比起纯粹地全局铺满点,蔚来选择策略性地增加区域点云密度,以避免占用计算资源,增加功耗、带宽等,提升数据利用的有效性,减轻算法压力,更利于整车感知系统运行,把「点」用在刀刃上。
每 0.01° 的角分辨率变化,在 200m 处,相邻的两个点距离约在 3.5cm。以 0.1° 角分辨率的激光雷达为例,其接收到的相邻两点间隔 35cm,对于行人、自行车、摩托车这样的目标物体,点云过于稀疏,对于算法挑战极大。

在更日常的用车过程,激光雷达能够让车辆对各类目标的检测距离获得更强的能力,更远更准的背后是整体前向感知能力的提升,依赖前向感知的功能都能从中受益。
具体场景便是,更平顺的跟车加减速、行驶途中被其他车切入时,更好把握减速时机与舒适度。
三、激光雷达是刚需?
从小场景入手,我们今天简单聊了聊激光雷达在智能汽车安全领域的作用。
以蔚来为例子,我们发现 NOP+ 与 AEB 功能进化的背后,都有激光雷达努力的身影。
蔚来 NT2 平台具有相对前瞻的产品思路,让其车型在 2021 年发布之初,就埋下了足够深厚的智能硬件基础,即使在加速迭代的 2024 年,NT2 依然跟得上应用和体验层面的时代步伐。
但在纯视觉方案声浪节节攀升的今天,蔚来的路线遭受到了不少质疑,这对于用户心智的占领并非好事,「夜游动物园」的出现,或许是蔚来应对挑战的其中一招。
而这样的行动,这两天并不少见。
无论是昨天的小鹏、蔚来、华为,还是今天的腾势,以及明天即将到来的理想 2024 智能驾驶夏季发布会,似乎都在昭示着中国智能驾驶领域,又在短期内进入到了短兵相接的状态。
我们甚至在空气中闻到焦虑的味道,焦虑什么?是各家端到端路线「正统」与否的讨论,是「全国都能开」旗号的落地,也是对有可能到来的特斯拉 FSD 入华的暗流涌动……
把握道路、向外传播、靴子落地,这三者同样重要。
值此骚动之际,蔚来发布的这条「夜游动物园」视频,能否让你相信激光雷达真的对用车安全有效兜底?如果你买一台以智驾为卖点的电动车,激光雷达会是刚需吗?
欢迎评论区分享意见。
(完)




















