
AEB是不是摆设?雨雾湿滑路面阿维塔07安全实测!


日常驾驶中,雨雪、雾天、湿滑路面等复杂极端路况是交通事故高发场景。车辆的AEB(自动紧急制动)功能,究竟能在这类场景中发挥实效,还是仅为“摆设”?辅助驾驶还能信赖吗?
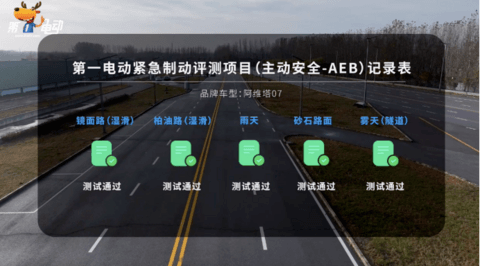
带着这一核心疑问,我们和新出行约定分别进行一场针对性的测试。我们将2026款阿维塔07驶入北京智能网联汽车测试基地,针对性设置镜面路、湿滑柏油路、雨天、砂石路、雾天隧道五大高危驾驶场景,开展真实、严苛的AEB极限测试,全面验证其在复杂路况下的主动安全性能。
▍五大高危场景实测:全工况验证安全实力
场景一:镜面湿滑路测试(摩擦系数接近冰面)

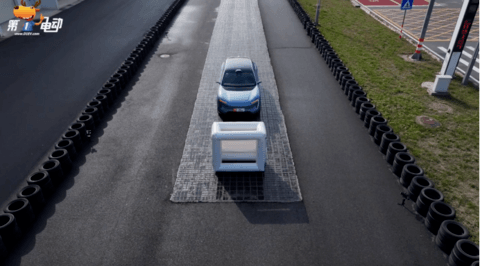
镜面路本身摩擦系数极低,远超普通雨天路面。为挑战极限,我们通过洒水进一步提升湿滑程度,并在路面末端放置静止故障车作为障碍物,测试车辆分别以30km/h、40km/h车速通过(受场地限制,未测试更高车速)。
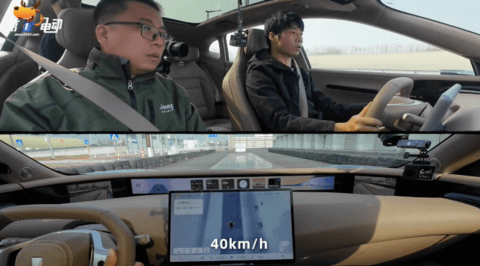
实测中,阿维塔07的激光雷达点云图迅速锁定故障车,中控SR界面实时显示障碍物提示并弹出红色预警,制动系统快速响应。30km/h、40km/h车速区间均成功刹停,其中40km/h工况下,车辆在距故障车2米处平稳停稳,全程无侧滑、无偏移,车身姿态始终稳定。
这一表现得益于两方面:一是固特异轮胎提升了一定的湿滑路面抓地力,配合ESP系统对车轮制动力的精准调节;二是192线激光雷达的强抗反光能力,即便路面反光严重,仍能持续输出准确的障碍物位置信息。
场景二:湿滑柏油路测试(日常高频高危场景)

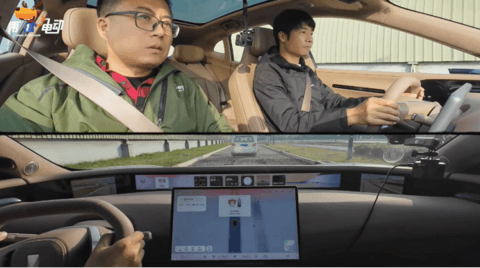
湿滑柏油路是日常通勤中最常见的高危场景,雨后未干的路面易导致车辆制动侧移。测试中,我们用两台洒水车将柏油路面完全浸湿,制造积水反光效果,在道路末端放置假车障碍物,测试车速从80km/h起步,最高至90km/h(受场地限制)。

测试结果显示,80km/h至90km/h车速区间内,阿维塔07均实现零失误刹停,且未出现积水误判情况。制动过程中,车辆始终保持直线行驶,无丝毫侧移。

核心保障来自4D毫米波雷达的高度感知能力,成功规避了积水反光造成的目标误判;同时华为全向防碰撞系统CAS4.0与ESP系统实时协同,根据路面附着力动态调节各车轮制动力,确保车身不跑偏、不侧滑。
场景三:雨天测试(密集雨幕+低附着力)

雨天驾驶的核心痛点是能见度下降与路面附着力降低,双重因素叠加会大幅增加碰撞风险。为还原真实中到大雨环境(测试场地喷头雨量不足),我们动用两台洒水车对向同步喷洒形成密集雨幕,在道路末端放置假车障碍物,车辆开启雨雾模式驶入测试区域,测试车速从80km/h逐步提升至90km/h。

即便在雨幕干扰下,阿维塔07的感知系统仍表现稳定:激光雷达点云图成功穿透雨幕锁定前方故障车,系统发出预警后迅速启动制动。实测数据显示,80km/h至90km/h车速区间均成功刹停,全程车身无晃动、无侧滑,积水路段仍保持平稳姿态。

这背后是华为全向防碰撞系统CAS4.0的快速决策能力——即便雨水干扰信号,系统也能快速输出稳定指令,配合底盘动态调节保障横向稳定;同时激光雷达250米的探测距离,为高速行驶预留了充足制动反应时间。
场景四:砂石路测试(碎石干扰+抓地力波动)

砂石路的特点是路面布满大小碎石,车轮碾压时易失去抓地力,制动时极易导致车身跑偏。测试中,我们在场地铺设大量碎石,模拟山区或施工路段真实路况,车辆以30km/h、40km/h车速测试(砂石路高速行驶风险过高,选取日常常用车速区间)。
实测过程中,车辆行驶扬起大量碎石,但感知系统未受干扰:12颗超声波雷达协同保障近距离感知精度,4D毫米波雷达成功过滤碎石干扰,精准识别静止故障车。两次测试中,车辆均顺利发出预警并制动,无虚假制动、无车身偏移,最终平稳停在故障车前方安全距离处。

关键支撑在于阿维塔07的底盘系统——实时调节悬挂和制动力分配,即便车轮碾过碎石导致抓地力波动,ESP系统也能快速响应修正车身姿态,确保横向稳定。
场景五:雾天隧道测试(能见度<50米)

雾天+隧道的组合堪称“感知系统杀手”,光线突变、能见度骤降易导致传感器性能下降,影响AEB功能响应。测试中,我们开启喷雾系统,将隧道内能见度降至50米以下,模拟真实雾天隧道环境,车辆以60km/h、70km/h、80km/h车速依次驶入测试区域。

实测中,阿维塔07的激光雷达展现出极强抗雾能力,即便在低能见度环境下,仍能识别前方故障车,点云图清晰勾勒障碍物轮廓;800万像素摄像头补全细节,确保决策准确。系统探测到障碍物后迅速发出预警并启动紧急制动,60km/h、70km/h、80km/h三个车速区间均成功刹停,全程无偏移、无碰撞。
192线激光雷达的高垂直分辨率,让低能见度下的远距离识别成为可能,为制动和横向稳定控制预留了充足时间,即便极端场景也能守住安全防线。
▍实测总结:全场景靠谱,主动安全实力硬核
经过五大高危场景的极限测试,2026款阿维塔07的AEB功能和横向稳定控制交出近乎满分的答卷:30km/h至90km/h全车速覆盖,镜面湿滑路到雾天隧道全复杂环境适配,始终保持零碰撞、零失误,制动响应迅速,横向稳定表现出色,无侧滑、跑偏、晃动等情况。
核心硬件配置:全维感知+智能协同
2026款阿维塔07搭载了同价位段顶尖的感知硬件组合,构建360°无死角感知矩阵,为复杂路况下的安全防护筑牢基础:
Ø1颗行业顶级192线激光雷达,支持20Hz高频扫描,即便在强光、雨雾等干扰环境中,也能精准捕捉障碍物信息;
Ø3颗4D毫米波雷达,新增高度感知维度,可有效区分真实障碍物与路面积水、碎石等干扰物,避免误判;
Ø11颗800万像素高清摄像头,负责补全细节信息,让远处目标清晰呈现;
Ø12颗超声波雷达,强化近距离感知补盲,提升探测精度。
这套硬件系统与华为全向防碰撞系统CAS4.0深度协同,从环境感知、决策分析到制动执行形成闭环安全防护,为复杂路况下的制动安全和横向稳定提供扎实技术支撑。

对于日常驾驶而言,这样的主动安全表现能大幅降低碰撞风险,尤其在雨天、雾天等视线不佳的场景下,AEB功能如同“隐形安全员”守护驾乘人员安全。AEB通常由两个系统组成,包括车辆碰撞迫近制动系统(CIB)和动态制动支持系统(DBS),其中CIB系统会在追尾以及驾驶员未采取任何行动的情况下,紧急制动车辆,而DBS在驾驶员没有施加足够的制动行动时,会给予帮助避免碰撞。据欧洲权威调查显示,安装AEB系统之后能减少27%的事故(并不能完全避免事故发生)。

本次测试的五大场景因为受场地条件限制,暂无法开展LCC功能的联动测试。需说明的是,AEB作为一种辅助驾驶安全功能,鲁棒性正在持续提升,早已跳出“娇弱”“尝鲜”“可有可无”的固有印象。面对各类极限场景,它通过雷达、摄像头等传感器监测前方车辆或行人的相对速度和距离,当检测到可能发生碰撞时,会先通过警告图形及蜂鸣报警提醒驾驶员,若驾驶员未采取措施,系统会自动进行制动,以避免或缓解碰撞,展现出稳定的可靠性,AEB已成为保障出行安全的必备核心配置。AEB作为主动安全核心功能,支持人驶与智驾双模式触发,安全独立性能已完成验证。大家还想看什么测试,欢迎在评论区留言。














