
自动驾驶内卷卡车界,行猩科技“造车”突围


「L4 级自动驾驶企业未来主要竞争对手将是以造车新势力为代表的车企。」
以往自动驾驶企业常被看作是车企的供应商,但随着行业变革和发展,部分 L4 级自动驾驶企业,也开始躬身进入造车领域,站在产业链的中心。
同时,业内逐渐形成一种新的共识,L4 级自动驾驶技术将率先在卡车物流场景实现商业化量产落地。
在此背景下,前小马智行副总裁赵睿璇联手 Waymo 技术大牛王清洲于 2021 年 8 月创立行猩科技,聚焦于 L4 级自动驾驶电动卡车物流的商业落地。
行猩科技将自身定义为卡车新势力,坚持走造电动车+自研自动驾驶发展路线。其造车方式类似于滴滴与比亚迪联手打造的 D1,最终目标也并非卖车,而是进行物流运营。
成立之初,行猩科技就完成了数百万美元融资。成立 8 个月后,行猩科技联合车企在产品端发布了一款 L4级自动驾驶纯电厢式货车 Apebot I。
这款车型采用了行猩科技的电动线控底盘和 L4 级别自动驾驶的前装量产方案,预计明年初实现量产下线。
01、卡车+物流,比乘用车运营市场更大
按照场景划分,自动驾驶有三个万亿市场:
无人出租(Robotaxi)
无人卡车(Robotruck)
智能汽车 Tier1
其中,无人卡车主要应用除了港口,矿区场景之外,最大的市场是公路运输。
行猩科技主要聚焦公路物流场景,这是一个 10 万亿规模的市场。
选择以自动驾驶卡车物流领域为切入点,赵睿璇告诉我们三点原因:
首先,从运营角度,物流是比乘用网约车更大的市场。
安信证券通过测算显示,2030 年国内的乘客总里程有望达到 10 万亿公里,Robotaxi的渗透率有望达到 6%~22%,单价在 2 元/公里。
综合来算,2030 年 Robotaxi的出行市场规模有望达到 1.2 万亿~4.4 万亿元。
相比之下,据亿欧智库测算,仅在 2021 年中国公路货运市场规模就已达到 5.85 万亿元。
国家统计局数据显示,2020 年中国社会物流总费用为14.9 万亿元,其中运输费用占比 52%,作为公路货运大国,中国公路货运量占全社会货运量比例长期在 75% 以上。
同时,相关数据显示,2020 年,全国拥有公路营运汽车 1171.54 万辆,拥有载货汽车 1110.28 万辆、15784.17 万吨位。其中,普通货车 414.14 万辆,专用货车 50.67 万辆,牵引车 310.84 万辆,挂车 334.63 万辆。
一般来说,国内卡车基本上都是运营车,对成本非常敏感,需要自动驾驶降本增效。

其次,卡车的电动化略晚于乘用车,是一个好的切入点。
行猩科技所坚持的一个核心观点,就是自动驾驶一定需要在电动车平台上。电动车无论是在底层的电能布局、网络通信、电子电气架构,还是在线性控制上,都比燃油车有明显优势。
目前,欧美部分公司的电动卡车已经实现小批量量产或上市阶段,但国内卡车电动化发展相对缓慢,这对于初创公司而言,是一个非常好的窗口机会。
最后,在 L4 级自动驾驶场景下,货运物流会比乘用车更快落地。
高速物流是一个半封闭场景,没有红绿灯,人车混行和复杂的路口冲突点。高速场景不会面临目前 Robotaxi 遇到的大量城区复杂长尾 corner case。
即使是在城区内稍复杂的场景,货运的路线路径也相对固定,这使得算法设计不会因过多的长尾问题而变得特别复杂,更好的支持数据驱动的算法架构,和循序渐进的落地方式。
货运物流市场规模足够大,比 Robotaxi 更快商业化落地,这也使得众多玩家将目光聚焦在该赛道,包括 Waymo、Aurora、百度、小马智行,滴滴等都开始切入干线物流市场。
与这些玩家相比,行猩科技虽是一家成立不久的初创公司,但从成立之初就切入造车,虽然挑战大,但却是一个比单纯做自动驾驶想象空间更大的市场。
02、造车+自动驾驶,实现软硬件一体优化
行猩科技整个业务发展模式,可以简单理解为造车+自研自动驾驶系统,组成自己的物流运营车队。
为什么要造车?
用赵睿璇的话来说,就是自己定义硬件,可以帮助软件进行更好的优化。
Alan Kay 曾说过:真正认真写软件的人应该自己做硬件。这句话被乔布斯在 2007 年第一代 iPhone 发布会上发扬光大。
谷歌当年只想做安卓系统适配所有手机,但每次更新功能,都需要跟所有机型适配,这无疑给团队增加了很多困难。
反观苹果,只需要适配自身硬件设备,反而能够在软件系统上优化的更好。
车本身零部件结构就比手机复杂,自动驾驶系统要实现对整车车身控制,就需要与车身进行深度适配。
因此,自动驾驶系统很难做到完全的普适性,即使是独角兽企业,最后也只能在一两款车上进行深度绑定,才能更好的优化算法。即使这样还经常需要在技术上妥协,才能够配合车企和 Tier 1 的产品规划。
此外,电动车与燃油车在结构上的最大区别在于动力系统和能源供应系统,电动汽车采用电池、电动机、控制器及相关设备替代了原有的内燃机和油箱。
一般来说,普通燃油车的零部件数量大概是 3 万个,汽车电动化将减少一半零部件。这使得电动车的产品标准化程度更高,行业准入门槛更低。
这也让行猩科技在对汽车产品进行需求定义时,难度系数呈数量级下降。
在造车方式上,行猩科技选择与代工厂合作,但前者在核心的三电系统、线控和计算平台定义、自动驾驶系统和软件等方面,具备完全的掌控权。

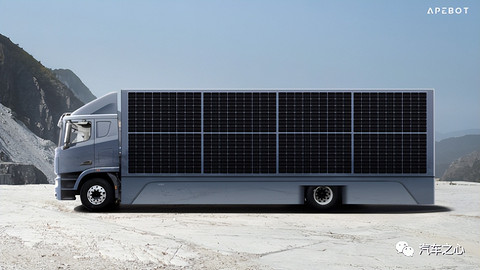
行猩科技已推出首款量产车Apebot I:
这是一款 4x2 的厢式货车,车货总重 18 吨,货箱长度为 9.6 米,货箱容积最大做到67 立方,是目前物流省内跨城最常用车型。
该车采用领先的集成式电驱后桥方案,同时应用了高速工况定制的液冷电池系统,实际满载续航达到 380km,可以满足大部分跨城运输需求。
行猩科技表示,Apebot I 是当前全球第一款L4 自动驾驶前装的纯电动车型。
目前 Apebot I 正在进行量产前的各种验证测试准备,预计将于 2023 年 2 月量产。这也是卡车真正意义上全球首款打通电动与线控的底盘。
行猩自研的软件控制算法与先进的 E/E 架构,让电机与电液转向和 EBS 系统配合更为精准和流畅,来更好实现自动驾驶对执行单元的控制。
为了更好的兼顾造车和自动驾驶系统的研发,行猩科技内部有两个完整独立的团队:
CEO 赵睿璇此前为自动驾驶企业小马智行副总裁,曾任 Facebook 大中华区游戏业务总经理,并在新浪微博、联想集团等企业担任高管。
在小马智行期间,完成了包括丰田在内的多家车厂及 Tier 1 的商业合作与融资,并带领卡车实现国内最先的高速物流场景落地运营。
自动驾驶团队:以CTO 王清洲为主,其是前 Waymo 构架部门技术负责人,曾在谷歌机器学习研究院长期担任技术负责人。毕业于清华大学自动化系,2011 年进入谷歌美国总部,2017 年加入 Waymo 构架部门,在职期间负责多个无人车核心技术研发。
整车团队:以整车工程副总裁马俊野为主,其在整车研发行业有近 15 年经验,曾任小鹏汽车底盘总监、北汽底盘部部长等职。
行猩科技在美国硅谷和中国上海均设有技术研发中心,团队成员均来自谷歌,Pony.ai 小马智行,高通,小鹏汽车,博世,采埃孚等行业头部公司。
行猩科技的终局目标,则是要搭建高效的无人电动运力网络,全部自动驾驶车队自主运营,提供成本极优的运输方案,主要客户群体也是各大物流公司或货主。
03、搭载 3 颗固态激光雷达,以视觉为主的多传感器融合系统
赵睿璇认为,未来卡车的终极形态将是把驾驶室去掉,仅有一个电动底盘搭载一个箱体,最后核心差异则还是体现在企业的自动驾驶能力和软硬件优化能力上。
这也是行猩科技的优势所在。
造车,让行猩科技具备自主定义硬件能力,基于对自动驾驶多年的行业经验,一方面其快速定义和研发适合的自动驾驶硬件,并结合整车工程实现硬件前装方案。
另一方面,则在于其自动驾驶系统能够与自主定义的硬件系统进行适配,从而实现更好的优化迭代。
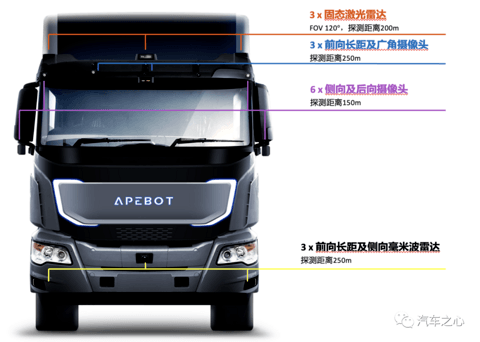
具体来说,在硬件层面上,行猩科技 L4 级自动驾驶卡车系统基于多传感器深度融合,包括 9 颗摄像头,3 颗毫米波雷达,以及 3 颗固态激光雷达,可以覆盖前向 250 米,及后向 150 米的区域。
当然,行猩科技的整个系统架构并不是完全依赖激光雷达,更多的是以视觉为主,激光雷达则是起到安全冗余的作用。
这里就要重点说下行猩科技自主研发的算法感知系统APANet。
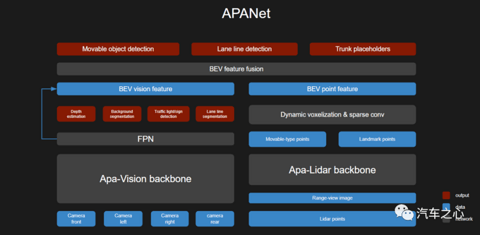
APANet 是一个多任务神经网络架构,是一个集障碍物检测、车道线检测、前后景语义分割、图像深度估计、鸟瞰视角(Bird』s-eye view)的目标检测和车道线检测等多个功能于一体的神经网络。
APANet 中的摄像头可以给整个系统带来更丰富的细节信息,通过最先进的算法,可以直接检测出相机视角的障碍物 3D 位置,同时可以通过神经网络隐式的学习 2D 到 3D 的投影关系,在 BEV 空间中融合多相机的特征,以学习出周边环境和障碍物的准确位置信息。
而激光雷达则是通过实体点云,提供了丰富的位置信息,APANet 中的激光雷达可以在前视图和俯视图等多个视角学习出精准的障碍物信息。
同时,激光雷达的特征引入了图形的语义信息后,对行人和小物体等具有更好的分类能力,而视觉特征在引入了激光雷达特征之后,能提升对少样本数据的召回率。
最为重要的是,行猩科技的 APANet 感知算法完全不依赖高精地图,其可以实时识别车道线和交通牌等地标,这些信息能帮助行猩科技的定位系统在不需要激光雷达和高精地图匹配的情况下,仅依靠 GPS、低配 IMU 和视觉特征就能实现自车定位。
不依赖高精度地图还有三个好处:
不受高精地图的限制,在任何 ODD 范围都可以行驶;
减少了高精地图采集和维护的巨大成本;
车载系统计算平台中不需要针对高精地图预留巨大的内存空间,同时也大大降低了对导航定位系统精度的要求,大幅降低车载系统和传感器的成本,更适合量产。
从车到自动驾驶系统,对于行猩科技而言,自动驾驶系统的软件迭代和优化,仍然是未来竞争发展的关键,当定义好硬件之后,对于其软件的优化迭代,将更具有优势。
04、造车,L4 技术落地量产的必由之路?
当前,自动驾驶企业是否要造车,一直是行业热点话题。
早期 Waymo 曾推出过一款小型两座原型车,但后续因乘用车投入成本高等原因,其并没有继续自主造车计划,而是转向向车企订购车型,自己进行改装路线。
当前,包括通用旗下的 Cruise,亚马逊收购的 Zoox,都已经公布了自主造车计划,滴滴此前也被爆出要自主造车,内部造车业务代号「达芬奇」。

Zoox 自动驾驶原型车
造车,对于 L4 级自动驾驶企业而言,无疑是一条实现 L4 技术上车的另一种思路,能够帮助这些企业更快实现 L4 技术商业化量产。
而相较乘用车,卡车因为其非承载式车身的灵活结构和对造型内饰的低需求,造车研发和产线的投入要低很多。未来无驾驶室的新车型将进一步降低造车难度。
一般来说,L4 级自动驾驶企业的商业化有三种路径:
造车+自研自动驾驶系统;
不造车,只做自动驾驶系统,自己运营车队;
做 Tier 1,为车企提供自动驾驶系统;
目前业内选择进行造车的 L4 级自动驾驶企业,除行猩科技之外,还有图森未来在国内组建成立的图灵智卡。
图灵智卡造车,首先将从货运厢式车切入,并逐步进入到重卡领域,其目标是打造更加符合自动驾驶车队运营要求、成本更低、体验更好的车型。
此前图森未来也是与车企合作开发车型,包括早前与传拓集团(TRATON)旗下的美国重卡制造商纳威司达(Navistar)达成合作,双方将于 2024 年开始量产自动驾驶重卡。
但不得不说,与车企合作量产车,相对自己造车而言,对于硬件的主导权并不高。
赢彻科技则是以自动驾驶系统为主,2019 年启动了与 OEM 联合开发自动驾驶重卡项目,双方还共同开发线控底盘,实现了整车级线控底盘的全冗余方案。
去年,赢彻科技在 2021 世界人工智能大会上展示了两款自动驾驶重卡量产车型,这两款车型分别是与东风商用车、中国重汽联合开发,搭载嬴彻轩辕自动驾驶系统。
苏州挚途科技则是 Tier 1 的角色,是一汽解放发起成立的智能车软硬件系统研发科技公司,致力于为一汽解放及行业提供 L2-L5 级的自动驾驶系统,并向行业赋能自动驾驶及智慧物流的完整解决方案。
去年 7 月,由挚途科技助力研发的面向干线场景的 J7 超级重卡正式前装量产下线。目前,挚途科技已经实现了以干线物流为重点,覆盖环卫、港口、口岸等场景的智能驾驶落地布局。
当前,以运营场景为主的 L4 级自动驾驶已经进入商业化量产的下半场竞争,作为被业内看好的能够最早商业化量产落地的自动驾驶卡车干线物流场景,也被众多玩家争夺。
面向未来,在三个商业化路径中,造车+自研自动驾驶系统路线无疑更具有想像空间,相对来说,其所面临的挑战也将会更大。
最终,谁能够跑赢终局,值得期待。




















