
高级辅助驾驶系统的量产有哪些挑战?


7月21日,一场主题为“云上加速,智行万里”的华为云智能驾驶创新峰会,在内蒙古自治区乌兰察布举办。
会上,北汽研究总院智能网联中心专业总师林大洋主要详细阐述了主机厂角度下,高级辅助驾驶系统量产要面临的挑战。
01
辅助驾驶开发方式发生变革
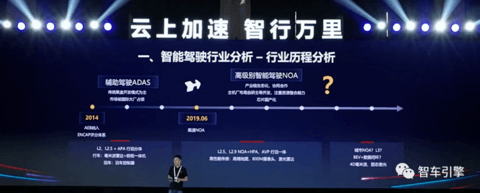
在林大洋看来,低阶辅助驾驶到高阶辅助驾驶,不仅是功能层面上的演进,在开发模式上也产生了极大变革。
林大洋认为,在ENCAP将AEB纳入了评分体系后,辅助驾驶ADAS市场进入爆发和急速增长期。
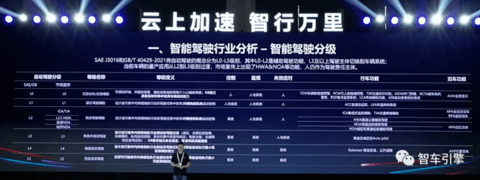
根据 L2的定义智能驾驶系统对车辆既能有横向控制,也能有纵向控制。林大洋认为,目前整个行业还都处在L2范畴中。只是在L2的演进中出现了很多的分支,就最简单的L2,即一个毫安波雷达加一个摄像就可以实现的单车道的L2。
随后出现了L2.5或者叫HWA的功能,即车辆可以在驾驶员触发变道的前提下去主动变道,但是变道行为是需要驾驶员给予的,并不是系统主动的。
所以L2级别主要还是人驾驶汽车。
在林大洋看来,L2.5及以下还是一些相对低阶的,或者是说比较简单的智驾系统。与之对应的,也是相对传统的黑盒的开发方式,即主机厂委托供应商黑盒开发。这个阶段,市场都是被国际大厂所占领的。
例如,在 ADAS 系统的感知、决策、执行三大环节中,感知由 Mobileye完成。
从NOA功能开始进入高阶智能驾驶,即在某些边界条件下,例如高精地图覆盖的范围内,车辆可以实现点到点的智能驾驶功能,例如,自动驾驶系统自己实现变道、超车、巡航等等的相关的功能。
高阶智能驾驶的标志性事件应该是2019年特斯拉发布高速NOA系统。此时高级别智能驾驶系统开始迎来爆发期。与之相对的开发模式,不再是黑盒模式,产业也不再是垂直供应模式,产业开始向生态化的合作、协同合作转变。
此时大部分主机厂都在寻求自研或者全栈自研。下一步,或许就是做数据闭环,例如在自动驾驶领域引入一些像BEV这种泛以上的大模型;以及一些高性能传感器,4D毫米波雷达,固态的激光雷达。
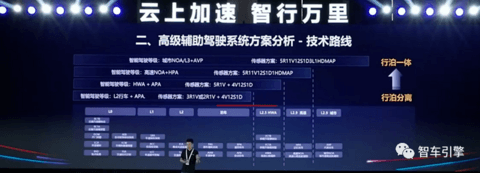
例如,低级别辅助驾驶系统是行泊分离的。行车方面,两个后角毫米波雷达,前向毫米波雷达+摄像头可以实现;泊车方面则需要单独的超声波雷达+泊车控制器,两套系统之间基本没有交互。
进入高级辅助驾驶阶段,行泊一体化发展,这就需要在域控器里面做视觉感知算法,做激光点云算法,做所有的决策规划算法等等。
也就是说高阶辅助驾驶功能是向下覆盖的,比如高速NOA系统需要实现所有的ADAS功能,这就导致辅助驾驶系统的开发难度大幅上升。
高速NOA功能、城市NOA功能有很多的细分的场景。例如高速NOA需要实现驶入驶出匝道、自主的换道等等的,都需要分功能分场景,在开发过程中实现。
在林大洋看来,目前高速NOA的主流路线还是基于高精地图可以实现,成本也在可接受范围之内。
不过,在城市的NOA阶段,就会有很多自己独特的功能和场景,例如十字路口的通行、环岛的通行、识别红绿灯等。此时需要引入激光雷达来应对城市里面这些复杂的工况,例如,识别一些复杂的交通参与者;应对corner case(极端情况),比如说车门打开了,能不能把车门打开的轮廓识别出来等。
因此,林大洋认为,就当前的技术,激光雷达是必须的。
02
高阶自动驾驶量产难点多
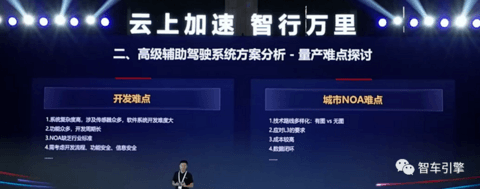
首先是,系统复杂度高,涉及传感器众多,软件系统开发难度大。传感器方面,既有摄像头,也有毫米波雷达、超声波雷达、激光雷达,包括组合惯导等等;软件系统方面,既有MCU里面基于传统CP跑的软件系统,也需要分层开发;也有基于在SOC基于AP框架,或者大家基于AP框架写的一些中间件操作系统,自己定制的内核以及上面的所有的感知和规控算法等。
其次,标准缺乏。这从一个细节就可以看出,NOA功能各家主机厂的叫法是不一样的,有叫NCA、NGP,以及NOP等等。此外,对于NOA功能边界在哪里?哪些性能指标是必须要满足的?上述这些,现在还没有一个真正意义上的统一的标准。
第三,开发难度大、周期长。由于NOA功能下,主机厂是希望用户能够脱手和脱脚,虽然一些法规限制了时长,但在设计时仍然要考虑功能安全、预期功能安全和信息安全等,整个开发难度就会非常大。
软件架构设计也非常复杂。需要考虑软件系统怎么来做架构,怎么来做合理的分布,例如,需要考虑一些实时性的东西整放在哪些核上跑;非实时性的,或者说对实时性要求不高,对安全性要求不高,怎么来处理等。
此外,高级辅助驾驶涉及的功能众多。除了NOA功能,可能还有20多个的ADAS功能,包括了行车、泊车,这些功能其实都需要逐一验证去开发,然后整个的开发周期还是非常长的。
林大洋还把NOA的难点拿出来单独阐述。
一是,技术路线多样化,有图VS无图。在他看来,整个城市NOA的技术路线其实是多样化的,有基于高精地图的,也有不需要高精地图的方案,比如说基于BEV或者说重感知轻地图的,到底哪个方向最优?“我个人认为现在可能会并存,基于高精地图的城市NOA系统能够保证量产,其实它是有一个下限的。”
基于BEV的方案,它对数据、算法的开发要求很高,量产难度会比较大,但其一旦量产了,能快速覆盖很多城市,不会像高精地图只能在个别城市释放。
二是,应对L3的要求。林大洋也提出了自己的疑问, “当我们的L3准入后,城市NOA系统和L3关系是什么样的?”
林大洋表示,他们在开发城市NOA系统时,都会去考虑对于L3的要求,包括冗余、功能安全、流程,包括安全的机制响应等。但是可能在L3的时候, odd不会是城市,一开始释放的ODD可能还是一个相对比较封闭的场景,比如说高速路等。
三是,成本高。当前的技术方案还是需要依靠激光雷达、需要大算力的芯片,可能某些方案里面需要高精地图,这就导致成本很高。成本过高就会导致它能搭载的量产车型价格可能还是30万 —40万元以上,这样的价位下很难做到真正的大规模量产。
“一台车能给智能驾驶系统的成本区间还是有限的,普通意义的车可能3%~5%,一些主打智能驾驶的车可能给到7%-10%,怎么上量是一个比较大的问题。”
四是,打造数据闭环。现在的这种系统基于多张地图的,包括以后做BEV的,需要整个数据不断的积累,不断的迭代,才能不停的覆盖不断出现的corner case。
03
北汽量产车型的分享和思考
针对上述智能驾驶的难点,北汽也做了一些尝试。以北汽极狐和华为合作的极狐阿尔法S先行版为例,这款车使用了华为in inside系统。车型设计上是希望能够给用户一个全场景的体验,包括泊车、行车,例如从小区开始坐上车,到公司的地库都可以使用辅助驾驶的功能。
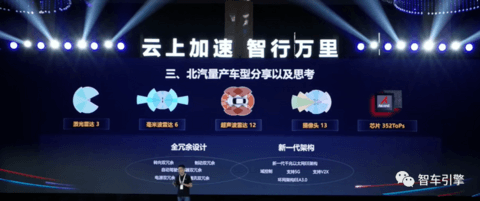
整车层面,在转向、制动、电源通讯全都做了冗余设计。智能驾驶本身传感器、控制器、感知的范围、算力等都做了足够的冗余。
同时,整车设计时也引入了很多的新一代的技术,包括千兆以太网,支持5G、支持V2X,以及环网架构EEA3.0等。
在城市NOA方面,极狐依赖高精度测距传感器,使得车辆在城市常规道路和夜间场景下更安全可靠。极狐的城市NOA功能是基于高精地图,目前已经释放的城市是深圳、广州和上海三地。
极狐的目标,是将高阶辅助驾驶或城市NOA系统做好,主要还是要将接管率降下来,“比如说在城市场景下,怎么能让尽可能的出现少接管,或者是说不接管,然后能够应对城市场景一些突发的情况,是当前做这套系统其实最大的一个挑战,也是我们会持续发力持续去优化的内容。”




















