
重地图or轻地图,谁主自动驾驶之沉浮?


现在估计没人否认高精地图是自动驾驶的先决条件,基于高精地图是一种用于自动驾驶的专题图,或许可以将其称为“自动驾驶地图”更为确切——其实高精地图是提供了一个自动驾驶环境的模型。换句话说,车辆要想顺利进行自动驾驶,必须对其周边的环境进行构建,这个环境的构建就是高精地图。
当然,说高精地图自然少不了高精度的定位技术。而就定位技术而言,目前有三类定位方法,理论上三种方法可以被交叉使用,以相互纠正达到更精准的效果:
1. 基于 GPS 和惯性传感器的传感器融合;
2. 基于 LiDAR 点云与高精地图的匹配;
3. 基于视觉的道路特征识别。
而且定位技术1的在我国是先天不足,问题在于我们的GPS信息是一定要加偏转的,加偏转以后,在定位的时候再进行解偏转,也就是说加扰和解扰的一个过程,但解扰的时候其实并不能绝对精确复原加扰之前的结果,它会有一个几米的随机误差。所以2或3的就更不可或缺。
现实中是目前还没有一个真正经济的高精度地图绘制方式,许多公司在绘制高精度地图时使用的方式都是非常昂贵的,这就导致自动驾驶就很难在量产意义上真正落地。
上面说到的三种定位方法,每个单独来用都不够精确,或者说冗余不够,全部都用又过于昂贵,收集全球所有道路的详细数据并保持实时更新是任何一家公司也无法做到的事。强如Google数十年的耕耘也不过积累了大概300万英里的测试数据,距离普遍认为的1000亿公里的“超越人类的可靠性“验证还遥遥无期。所以"众包"的联盟/合作模式就开始成为可行的选择。
而在各家的高级地图的绘制策略上,也有了“重地图”和“轻地图”的技术路线之争,简单来说,上面提到的定位技术1+2就是“重地图”,1+3就是“轻地图”。重地图一派由Google领衔,包括了自动驾驶行业众多的主机厂和科技公司;而轻地图则主要是Mobileye和Bosch在主导。
在 2016 年的 CES 上, Mobileye 发布了基于前置摄像头捕捉道路标识的定位服务 REM(Road Experience Management),也即“路书”(Roadbook),率先提出了利用民用车辆上所搭载的前置摄像头,收集道路标识数据,并辅助高精度地图定位的「众包」模式,让车辆直接用路书去做自动驾驶。由于目前大部分市面上的新车都搭载了前置摄像头,且摄像头所捕捉的地图数据为小尺寸的 2D 画面。因此这种方式有着积累速度快,传输数据量小,实现成本低的优势。在过去的一年多时间中,Mobileye 已经陆续和知名图商Here、日本 Zenrin、以及大众、宝马等公司就 REM 技术达成了合作。
正在业界为 Mobileye 的 REM 技术的未来担忧的时候,在2017上海车展上,博世联合了百度、高德和四维图新,共同发布了针对中国道路环境的"众包"高精度地图定位方案:Bosch Road Signature(BRS)。从本质上来看,其模式与 REM 殊途同归,都是基于车辆现有sensor进行“众包”的精准定位服务。但在摄像头之外,博世还在 BRS 中加入了对毫米波雷达的支持——摄像头将负责抓取车道线、路牌、减速标识等,而雷达将去捕捉隔离栏、电线杆、桥梁等道路基础设施。不同车辆捕捉到的信息将被上传到云端进行叠加和计算,从而生成能够定位的高精度地图层。
来源:Mobileye
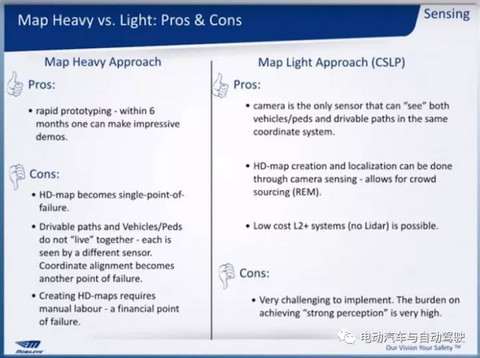
Mobileye的现CEO Amnon Shashua曾在某次演讲中提到过,重地图模式的一个很重要的优点在于非常容易设计出原型,找一些有实力的工程师用上半年的时间就能做到一个不错的demo来吸引投资。这就是一些硅谷团队在做的事。
而其缺点在于:
1)重地图模式下车辆对高精度地图的过于依赖,在极端条件下没有高精度地图车就什么都做不了。
2)可驾驶路径和车辆/行人处于不同坐标系统中,很难协同,且每类物体由不同的传感器识别,将它们同步到同一个坐标系统中,很容易产生错误。
3)资本投入巨大,成本高昂的数据采集车和测试车、大量的人工标注等,都是巨额的成本投入。
相比来讲轻地图模式的优点在于:
1)摄像头是唯一的环境感知传感器,在同一坐标系统中同时检测车辆/行人以及可驾驶路径,无需坐标同步。
2)使用数量众多的已经在路上跑的量产车载摄像头众包获取数据,制作高精度地图,大大降低了成本。
3)可实现低成本的level 2+等级自动驾驶。在level 2中,驾驶员需要对车辆驾驶控制负责,但是通过轻地图模式,可以实现类似level 3、level 4的体验,加入其他低成本传感器如毫米波雷达等能进一步增强系统冗余。这条路线具有现实的商业和市场前景。
而轻地图模式的缺点也是显而易见——非常难以实现,这取决于机器学习算法的先进程度和数据的完备性。
不管哪种技术路线,最终的目的都是要在某些领域商业化。而说到自动驾驶的商业化,其实是在一个技术、成本和需求三者之间寻找交集和寻找平衡的过程。在这个过程中,重地图和轻地图模式,谁会率先在自身适合的领域实现大规模的商业化呢?也或者随着V2X技术的发展和大范围铺开,重地图or轻地图就不再需要了呢?一切都还是未知数。
本文首发于2025AD.CN
来源:第一电动网
作者:电动汽车与自动驾驶
本文地址:
本文由第一电动网大牛说作者撰写,他们为本文的真实性和中立性负责,观点仅代表个人,不代表第一电动网。本文版权归原创作者和第一电动网(www.d1ev.com)所有,如需转载需得到双方授权,同时务必注明来源和作者。
欢迎加入第一电动网大牛说作者,注册会员登录后即可在线投稿,请在会员资料留下QQ、手机、邮箱等联系方式,便于我们在第一时间与您沟通稿件,如有问题请发送邮件至 content@d1ev.com。
文中图片源自互联网,如有侵权请联系admin@d1ev.com删除。




















